
所属成套资源:浙教版(广西、宁波)九年级信息技术全册课件PPT+教案+音视频
初中浙教版 (广西、宁波)第十四课 机器人回家教学ppt课件
展开
这是一份初中浙教版 (广西、宁波)第十四课 机器人回家教学ppt课件,文件包含机器人回家ppt、机器人回家doc、ppt素材视频1wmv、ppt素材视频2wmv等4份课件配套教学资源,其中PPT共10页, 欢迎下载使用。
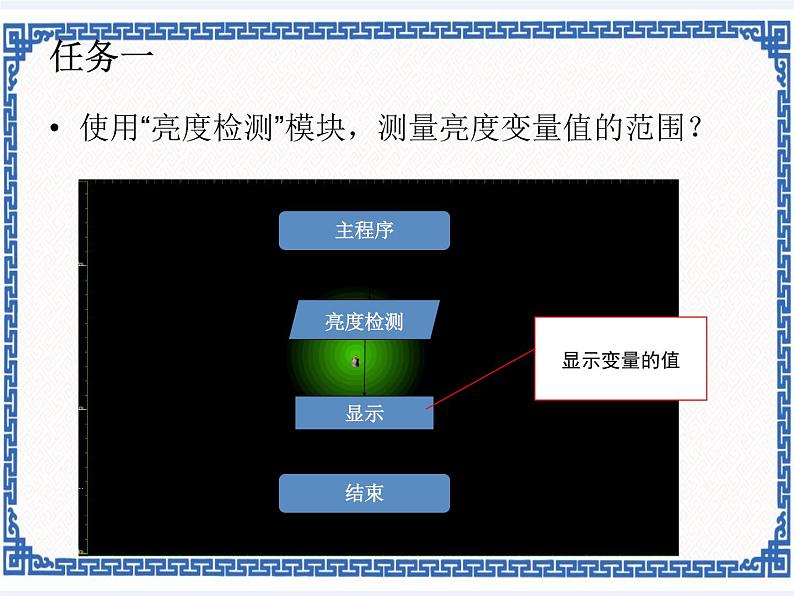
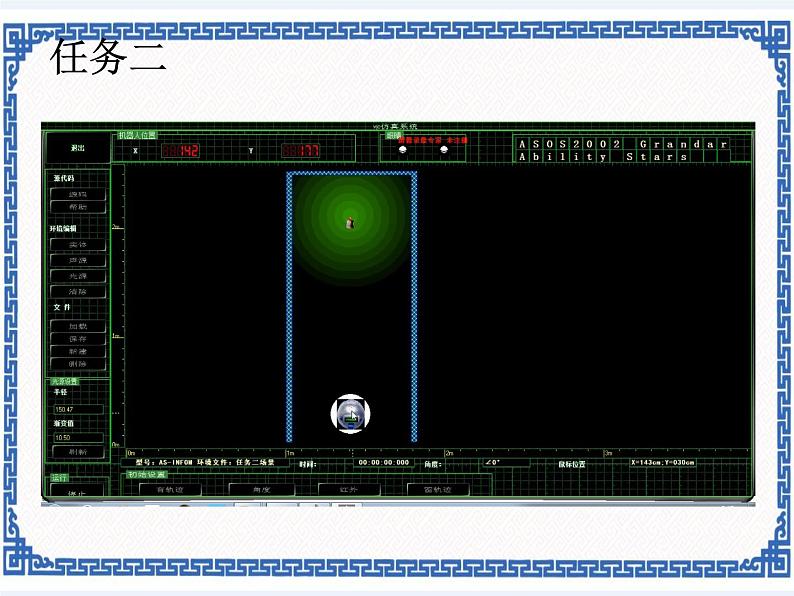
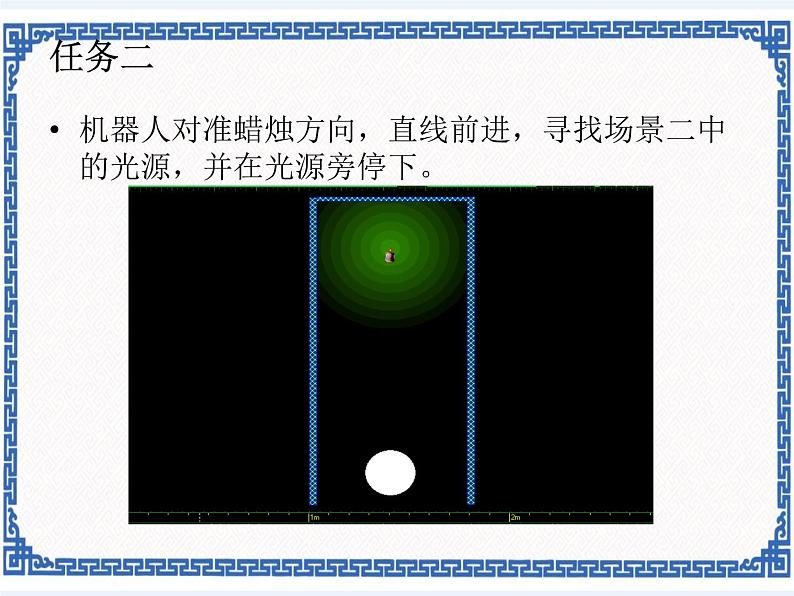
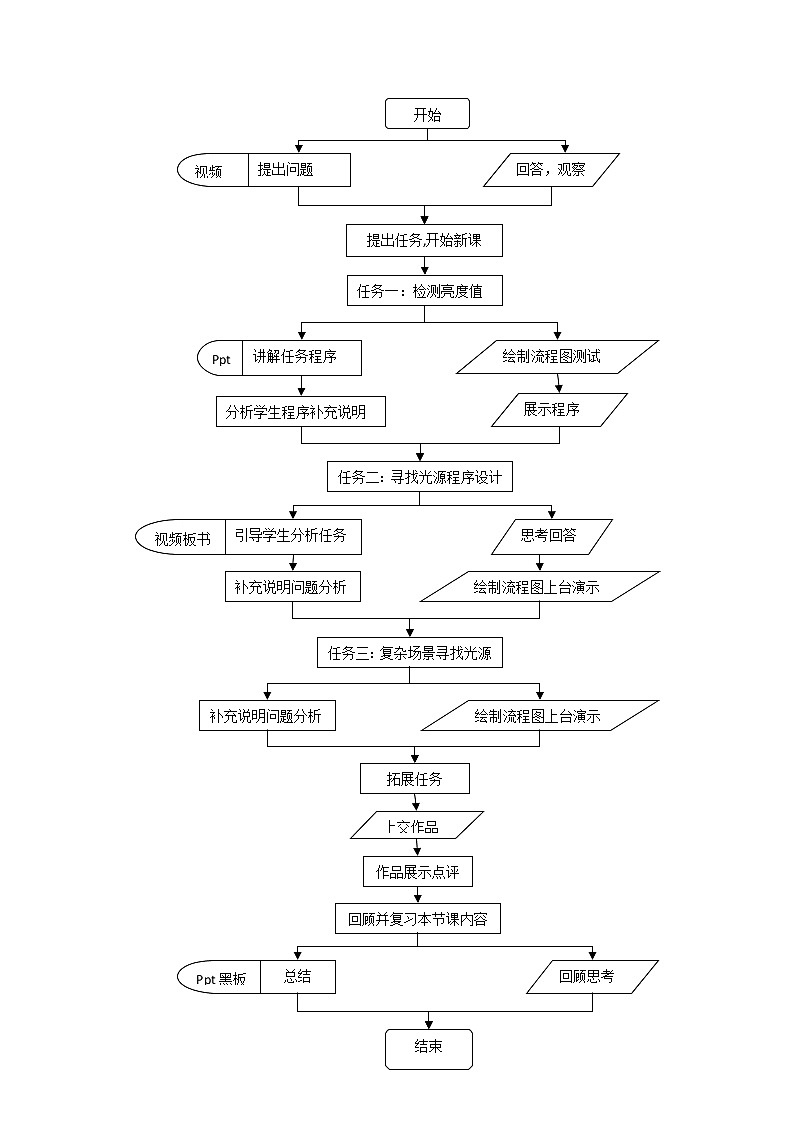
机器人回家一、教材分析本节课是浙教版信息技术九年级第十四课,在《中小学信息技术课程指导纲要(试行)》中属于“智能机器人”模块。本课主要介绍了光敏传感器“亮度检测”模块和“条件循环”模块的使用。前面已经学习了红外线传感器,这对本课光敏传感器的使用有了一定的帮助,而“条件循环”模块则与“多次循环”模块和“永久循环”模块相类似。下节课走迷宫也需要灵活的掌握“条件循环”模块的使用。因此本课有着承上启下的作用。二、学生分析学生是七年级学生,已经学习了广茂达VJC1.5仿真软件的基本操作,通过上节课的学习已经了解了红外传感器的主要功能以及“红外测障”模块的使用;学会了使用基本的模块来绘制流程图,有一定的信息技术素养,基本掌握了软件的基本操作技能,能够在仿真界面测试机器人程序。学生对于智能机器人如何使用机器感觉亮度比较感兴趣。三、教学策略演示法、自主探究法和任务驱动法。四、教学目标掌握“亮度检测”模块的使用初步学会利用“条件循环”模块进行编程学会通过分析任务绘制流程图五、重点难点重点:使用“亮度检测”模块和“条件循环”模块进行编程难点:分析任务得出算法的设计六、教学环境计算机房网络环境:局域网,ITtools教学辅助平台服务器软件要求:广茂达VJC1.5仿真软件、ITtools教学辅助平台七、教学流程图八、教学过程一、创设情境,提出任务师:同学们,有没有听过飞蛾扑火这个成语,这是一个什么样的现象?生:飞蛾扑向火堆烧死了。师:飞蛾这种昆虫他有个感光器官,能够在黑暗中帮助他寻找光明,其实机器人也有同样的功能。 播放机器人寻找光源的视频。师:我们把机器人这种器官称之为光敏传感器。这节课,老师就和大家一起利用光敏传感器编写程序,让机器人在黑暗中不断摸索找到光明,带机器人回家。(设计意图:激发学生兴趣,提出本课的任务)二、启发引导,新课学习师:同学们我们上节课学习了一个什么传感器?什么作用?在仿真软件中通过 “红外测障”模块来实现其功能。那么光敏传感器在仿真软件中可以用 “亮度检测”模块来实现其功能,主要的作用检测场景中各个位置的亮度变量值。那么检测亮度变量值的程序需要哪些模块呢?“亮度检测”模块用来检测亮度值,“显示”模块用来显示所测的亮度值。接下来请同学们使用这两个模块,检测场景一中各个位置的亮度变量值,完成任务一。(ppt投影程序流程图)任务一:使用“亮度检测”模块,测量场景一中各个位置的亮度变量值?教师巡视,个别辅导。学生操作,展示学生作品。教师评价学生作品,补充说明亮度值与距离的关系。(预设问题一:亮度值没有显示。解决方案:教师讲解,“显示”模块设置。)师:那么现在开始观察下机器人寻找蜡烛的视频。播放视频任务二: 机器人对准蜡烛方向,直线前进,到达设置的亮度值位置,停止前进。任务分析:一师:机器人的目的是什么?生:停在蜡烛附近,亮度值为128。师:如果没有达到目的它是怎么在运动的?生:直行并不断的检测所在位置的亮度值。师:直行和检测亮度这个动作是在重复执行还是只执行了一次?师:这种重复执行某个动作我们可以用“循环”来实现。循环的内容是?生:直行和亮度检测师:循环几次到达目标点知道吗?生:不知道师:循环几次我们不知道,但是停在哪个亮度值点上我们是不是可以自己确定?可以给循环加上一个条件,例如亮度值大于128,符合条件则循环动作,不符合条件则停止运动。因此我们可以用“条件循环”模块。师:程序完整了吗?在判断条件前,还需要先给他一个亮度值,所以前面还需要个“亮度检测”模块。此外还需要主程序、结束模块。同学们根据我们黑板上的分析,检测下此程序是否能找到场景二中的蜡烛。(教师板书展示流程图)教师巡视,个别辅导。学生操作,上台演示教师评价学生作品,补充说明(预设问题一:碰倒蜡烛。解决方案:缩短每次前进的距离。预设问题二:机器人不动。解决方案:“条件循环”模块设置有问题。)师:同学们,有的时候场景中的蜡烛不在正前方,例如场景三,那么这个程序还能帮助机器人找到蜡烛吗?场景三中模拟师:出现了什么情况?生:在转角处卡住了师:因为我们编写的程序机器人运动的模式只有直行。现在这个场景三前方有障碍,所以要让他右转。如何让他在有障碍的时候右转?“红外测障”模块。结合我们上节课所学的知识,修改程序,是机器人能够在场景三中找到蜡烛。任务三:机器人寻找房间中的光源,并在光源旁停下。教师巡视,个别辅导。学生操作,上台演示。教师评价学生作品,补充说明拓展任务:机器人寻找复杂房间中的光源。 (设计意图:三个课堂任务,由浅入深层层推进,让学生学会机器人回家程序的设计。任务二通过一问一答,让学生学会分析问题,教师通过学生的回答,板书写出流程图,突破难点。拓展任务则是为了学生巩固所学的知识,学以致用。)三、 自我检测,作品评价展示机器人找到光源的过程。让学生自己评价作品是否达成预设目标。评价标准是否能够在光源附近停止(设计意图:通过展示作品,使学生有成就感,激发学习兴趣)四、 总结完善,温故知新教师:通过今天的学习,你学到了什么?学生分享学习成果1.“亮度检测”模块的作用?2.什么时候使用“条件循环”模块?3.机器人回家程序如何设计? 最后,我们想一想生活中,哪些地方还用到这个程序? 寻找火源,帮助灭火(设计意图:知识回顾,激发学生拓展思考,培养其创新思维能力。)
相关课件
这是一份初中信息技术新世纪版八年级上册第十四课 凯撒密码教学ppt课件,文件包含第十四课凯撒密码ppt、第十四课凯撒密码教学设计doc等2份课件配套教学资源,其中PPT共15页, 欢迎下载使用。
这是一份浙教版 (广西、宁波)七年级上第十四课 认识地震(一)——PowerPoint超级链接图文ppt课件,文件包含第十四课认识地震一PowerPoint超级链接课件pptx、认识地震mp4等2份课件配套教学资源,其中PPT共22页, 欢迎下载使用。
这是一份浙教版 (广西、宁波)九年级第十七课 智慧出行教课内容课件ppt,文件包含智慧出行ppt、素材智慧出行行程规划doc、智慧出行wmv等3份课件配套教学资源,其中PPT共17页, 欢迎下载使用。