
还剩24页未读,
继续阅读
成套系列资料,整套一键下载
小学信息技术粤教版 (B版)第三册上第11课 听话的Arduino机器人精品ppt课件
展开
这是一份小学信息技术粤教版 (B版)第三册上第11课 听话的Arduino机器人精品ppt课件,共32页。PPT课件主要包含了妈妈留下的痕迹,小瓢虫妈妈,新知导入,知识讲解,Arduino的来源,新知讲解,Arduino机器人,Arduino主控器,马达驱动装置,供电装置等内容,欢迎下载使用。
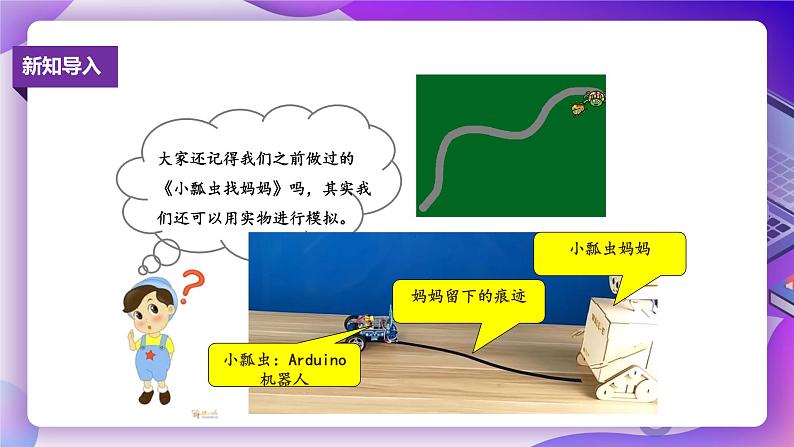
小瓢虫:Arduin机器人
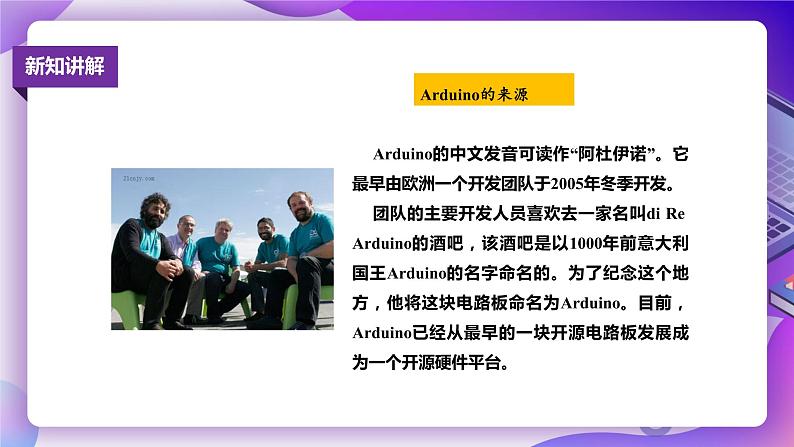
Arduin的中文发音可读作“阿杜伊诺”。它最早由欧洲一个开发团队于2005年冬季开发。 团队的主要开发人员喜欢去一家名叫di Re Arduin的酒吧,该酒吧是以1000年前意大利国王Arduin的名字命名的。为了纪念这个地方,他将这块电路板命名为Arduin。目前,Arduin已经从最早的一块开源电路板发展成为一个开源硬件平台。
Arduin是一种使用方便、功能强大的开源硬件控制器,其中含有可存储和执行ArduinScratch程序的微电脑装置。用它做主控器制作的机器人,称为Arduin机器人。
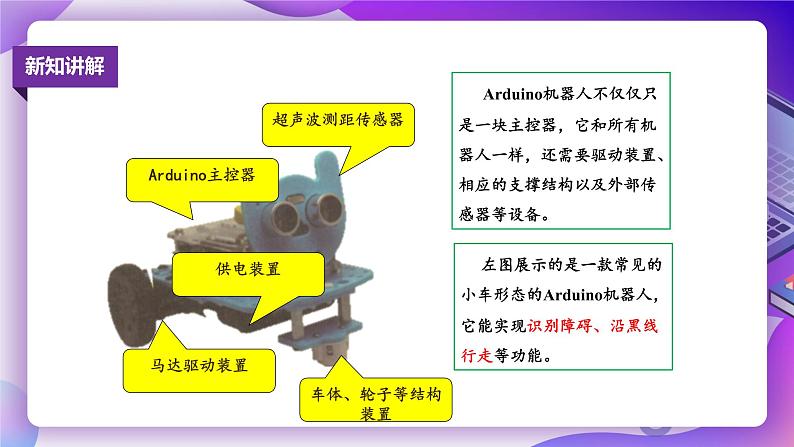
Arduin机器人不仅仅只是一块主控器,它和所有机器人一样,还需要驱动装置、相应的支撑结构以及外部传感器等设备。
左图展示的是一款常见的小车形态的Arduin机器人,它能实现识别障碍、沿黑线行走等功能。
首先把Arduin机器人的主控器与选用的驱动装置、支撑构件以及外部传感器等设备连接起来。
如右图,将相关硬件正确地连接到对应的接口。其中USB数据线接口用于与电脑连接并下载程序到主控器。
USB数据线正确连接至电脑后,在ArduinScratch软件的“连接”菜单中勾选相应的COM7端口号,确保软件和硬件的正常通信。
在电脑中应用ArduinScratch搭建机器人脚本程序,实现让机器人小车前进一秒之后再后退一秒。这样做的原因是什么呢?
这样可以帮助我们初步测试机器人各部分连接是否正常。
效果:启动Arduin机器人程序
效果:实现小车重复“前进1秒之后再后退1秒”。
值越大机器人移动速度越快
用鼠标右键单击“Arduin程序”模块,在弹出的快捷菜单中点击“上传到arduin”,程序便开始上传至Arduin主控器,上传成功后会出现提示。
数字接口和模拟接口有什么区别呢?请观看课本P93回答问题。
请自己尝试让机器人向前前进一秒之后再后退一秒。
机器人如何识别轨迹和障碍物呢?
机器人识别轨迹和障碍物要借助传感器,它们就像机器人的眼睛,不断捕捉外界信息并传回主控器。
这里,我们选择轨迹传感器来识别黑线,选择超声波传感器来识别障碍物。
1. 轨迹传感器能区分黑色和白色以及中间过渡的灰色,把它接在模拟接口上,它可以返回一个范围在0~1023之间的值,地面越黑,值越小;底面越白、值越大。2. 我们一般会取白色底面和黑线读值中间值作为比较值,当读取值大于比较值时,认为轨迹传感器位于白色地面,否则认为它处于黑线上。轨迹传感器一般安装在机器人底部,贴近底面。如果使用两个或两个以上轨迹传感器,能更方便、更精确地识别黑线。3. 超声波传感器能检测与前方障碍物之间的距离。
将两个轨迹传感器安装在小车底部,用数据线将左侧轨迹传感器接在主控器A1口,右侧轨迹传感器接在主控器A2口。
注意:线的颜色与接口的颜色要保持对应。
(2)安装超声波传感器
将超声波传感器直接插在主控器超声波接口上。
Arduin的针脚读取模块。
作用:读取数字口针脚的值
作用:读取模拟口针脚的值(模拟传感器)
作用:读取距离值(超声波传感器)
机器人的行走靠电机执行程序命令来实现,电机的驱动可以使用“Arduin机器人”模块类的下列模块实现。
效果:侦测左侧传感器是否压在黑线上。
500为比较值,当读值大于比较值时,认为传感器离开了黑线。
效果:根据左侧轨迹传感器的返回值,确定其是否离开黑线,如果离开,则让机器人右转。
当A1模拟口读取值大于500时,代表左侧轨迹传感器离开了黑线,需要让小车右转回到黑线。
效果:根据右侧轨迹传感器的返回值,确定其是否离开黑线,如果离开,则让机器人左转,否则让机器人前进。
判断右侧传感器是否离开黑线
效果:根据超声波传感器返回的读取值判断是否抵达障碍物前方,如果抵达则机器人停止,否则机器人沿黑线行走。
获取与前方障碍物的距离值,根据其读值是否小于10来判断是否抵达障碍物前方。
用前面的方法将程序上传至Arduin机器人小车的主控器,关闭电源,拔除数据线。 选择平整的桌面或者底面,将小车放置在黑色的轨迹线上,注意轨迹传感器要对准黑线,打开小车电源开关,开始测试。
上面的程序中,机器人小车行走的速度是固定的,如果想调整它的速度,就需要在程序中更改速度值后重新上传程序。怎样更方便地调整小车的速度呢?请你利用主控器上的滑杆传感器实现这一功能。
小瓢虫:Arduin机器人
Arduin的中文发音可读作“阿杜伊诺”。它最早由欧洲一个开发团队于2005年冬季开发。 团队的主要开发人员喜欢去一家名叫di Re Arduin的酒吧,该酒吧是以1000年前意大利国王Arduin的名字命名的。为了纪念这个地方,他将这块电路板命名为Arduin。目前,Arduin已经从最早的一块开源电路板发展成为一个开源硬件平台。
Arduin是一种使用方便、功能强大的开源硬件控制器,其中含有可存储和执行ArduinScratch程序的微电脑装置。用它做主控器制作的机器人,称为Arduin机器人。
Arduin机器人不仅仅只是一块主控器,它和所有机器人一样,还需要驱动装置、相应的支撑结构以及外部传感器等设备。
左图展示的是一款常见的小车形态的Arduin机器人,它能实现识别障碍、沿黑线行走等功能。
首先把Arduin机器人的主控器与选用的驱动装置、支撑构件以及外部传感器等设备连接起来。
如右图,将相关硬件正确地连接到对应的接口。其中USB数据线接口用于与电脑连接并下载程序到主控器。
USB数据线正确连接至电脑后,在ArduinScratch软件的“连接”菜单中勾选相应的COM7端口号,确保软件和硬件的正常通信。
在电脑中应用ArduinScratch搭建机器人脚本程序,实现让机器人小车前进一秒之后再后退一秒。这样做的原因是什么呢?
这样可以帮助我们初步测试机器人各部分连接是否正常。
效果:启动Arduin机器人程序
效果:实现小车重复“前进1秒之后再后退1秒”。
值越大机器人移动速度越快
用鼠标右键单击“Arduin程序”模块,在弹出的快捷菜单中点击“上传到arduin”,程序便开始上传至Arduin主控器,上传成功后会出现提示。
数字接口和模拟接口有什么区别呢?请观看课本P93回答问题。
请自己尝试让机器人向前前进一秒之后再后退一秒。
机器人如何识别轨迹和障碍物呢?
机器人识别轨迹和障碍物要借助传感器,它们就像机器人的眼睛,不断捕捉外界信息并传回主控器。
这里,我们选择轨迹传感器来识别黑线,选择超声波传感器来识别障碍物。
1. 轨迹传感器能区分黑色和白色以及中间过渡的灰色,把它接在模拟接口上,它可以返回一个范围在0~1023之间的值,地面越黑,值越小;底面越白、值越大。2. 我们一般会取白色底面和黑线读值中间值作为比较值,当读取值大于比较值时,认为轨迹传感器位于白色地面,否则认为它处于黑线上。轨迹传感器一般安装在机器人底部,贴近底面。如果使用两个或两个以上轨迹传感器,能更方便、更精确地识别黑线。3. 超声波传感器能检测与前方障碍物之间的距离。
将两个轨迹传感器安装在小车底部,用数据线将左侧轨迹传感器接在主控器A1口,右侧轨迹传感器接在主控器A2口。
注意:线的颜色与接口的颜色要保持对应。
(2)安装超声波传感器
将超声波传感器直接插在主控器超声波接口上。
Arduin的针脚读取模块。
作用:读取数字口针脚的值
作用:读取模拟口针脚的值(模拟传感器)
作用:读取距离值(超声波传感器)
机器人的行走靠电机执行程序命令来实现,电机的驱动可以使用“Arduin机器人”模块类的下列模块实现。
效果:侦测左侧传感器是否压在黑线上。
500为比较值,当读值大于比较值时,认为传感器离开了黑线。
效果:根据左侧轨迹传感器的返回值,确定其是否离开黑线,如果离开,则让机器人右转。
当A1模拟口读取值大于500时,代表左侧轨迹传感器离开了黑线,需要让小车右转回到黑线。
效果:根据右侧轨迹传感器的返回值,确定其是否离开黑线,如果离开,则让机器人左转,否则让机器人前进。
判断右侧传感器是否离开黑线
效果:根据超声波传感器返回的读取值判断是否抵达障碍物前方,如果抵达则机器人停止,否则机器人沿黑线行走。
获取与前方障碍物的距离值,根据其读值是否小于10来判断是否抵达障碍物前方。
用前面的方法将程序上传至Arduin机器人小车的主控器,关闭电源,拔除数据线。 选择平整的桌面或者底面,将小车放置在黑色的轨迹线上,注意轨迹传感器要对准黑线,打开小车电源开关,开始测试。
上面的程序中,机器人小车行走的速度是固定的,如果想调整它的速度,就需要在程序中更改速度值后重新上传程序。怎样更方便地调整小车的速度呢?请你利用主控器上的滑杆传感器实现这一功能。
相关课件
小学信息技术粤教版 (B版)五年级上册第11课 听话的Arduino机器人备课课件ppt: 这是一份小学信息技术粤教版 (B版)五年级上册第11课 听话的Arduino机器人备课课件ppt,共12页。PPT课件主要包含了让机器人动起来,自动识别黑线原理分析,你真棒,自动识别障碍原理分析等内容,欢迎下载使用。
小学信息技术第11课 听话的Arduino机器人图片课件ppt: 这是一份小学信息技术第11课 听话的Arduino机器人图片课件ppt,共14页。PPT课件主要包含了让机器人动起来,机器人装置接线图,下载脚本程序,你真棒等内容,欢迎下载使用。
粤教版 (B版)五年级上册第11课 听话的Arduino机器人课文配套课件ppt: 这是一份粤教版 (B版)五年级上册第11课 听话的Arduino机器人课文配套课件ppt,共25页。PPT课件主要包含了让机器人动起来,机器人装置接线图,下载脚本程序,你真棒,自动识别黑线原理分析,自动识别障碍原理分析等内容,欢迎下载使用。












