还剩6页未读,
继续阅读
小学信息技术粤教版 (B版)第三册上册第9课 沿轨迹行走的机器人综合与测试教课ppt课件
展开
这是一份小学信息技术粤教版 (B版)第三册上册第9课 沿轨迹行走的机器人综合与测试教课ppt课件,共11页。
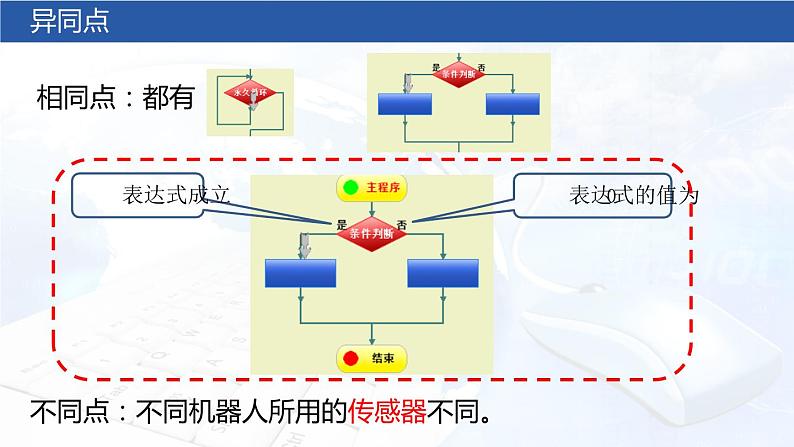
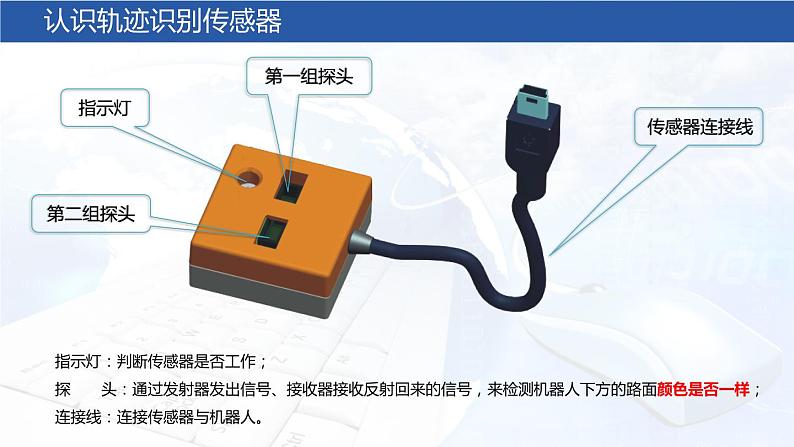
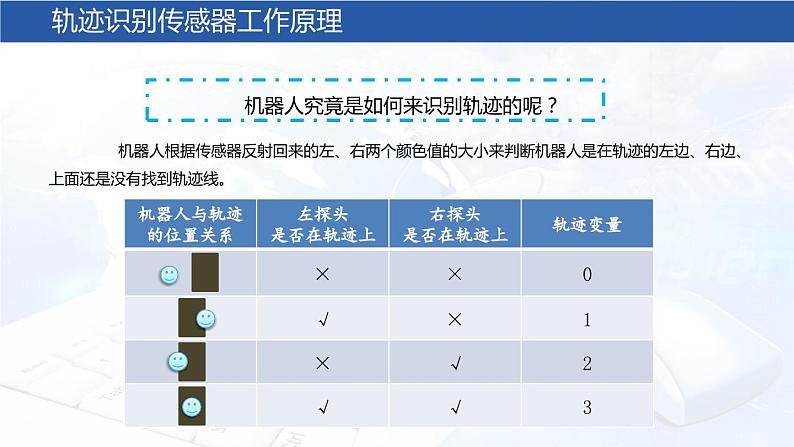
沿轨迹行走的机器人学习回顾 同学们,目前为止,我们都学习了哪些机器人,你还记得吗?他们的程序有什么相同和不同之处呢? 请打开你的“计算机/E盘/作品”查看你已经保存了哪些机器人程序,这些都是同学们这学期的学习成果噢! 表达式成立表达式的值为0异同点不同点:不同机器人所用的传感器不同。认识轨迹识别传感器传感器连接线指示灯第二组探头第一组探头指示灯:判断传感器是否工作;探 头:通过发射器发出信号、接收器接收反射回来的信号,来检测机器人下方的路面颜色是否一样;连接线:连接传感器与机器人。 机器人根据传感器反射回来的左、右两个颜色值的大小来判断机器人是在轨迹的左边、右边、上面还是没有找到轨迹线。 机器人究竟是如何来识别轨迹的呢?轨迹识别传感器工作原理直线行走①轨迹变量变为0②轨迹变量变为1③轨迹变量变为3④轨迹变量变为2⑤轨迹变量变为0行进方向牛刀小试 根据我们以前学习的知识,你能独自编写一个机器人沿直线行走(三种情况)的程序吗? 当机器人识别到轨迹,就高速前进; 当机器人没有识别到轨迹,就停止前进。曲线行走 机器人贴着轨迹的边缘走和在轨迹内部走都能达到“沿轨迹走”的效果。而且“贴着轨迹的边缘走”的方法更简单。小贴士轨迹变量==1左探头(看到)右探头(看不到)(表达式成立)小贴士机器人右转机器人左转左探头(看不到)右探头(看不到)(表达式不成立)轨迹变量==1崭露头角考验你的时候到啦! 谢谢聆听
沿轨迹行走的机器人学习回顾 同学们,目前为止,我们都学习了哪些机器人,你还记得吗?他们的程序有什么相同和不同之处呢? 请打开你的“计算机/E盘/作品”查看你已经保存了哪些机器人程序,这些都是同学们这学期的学习成果噢! 表达式成立表达式的值为0异同点不同点:不同机器人所用的传感器不同。认识轨迹识别传感器传感器连接线指示灯第二组探头第一组探头指示灯:判断传感器是否工作;探 头:通过发射器发出信号、接收器接收反射回来的信号,来检测机器人下方的路面颜色是否一样;连接线:连接传感器与机器人。 机器人根据传感器反射回来的左、右两个颜色值的大小来判断机器人是在轨迹的左边、右边、上面还是没有找到轨迹线。 机器人究竟是如何来识别轨迹的呢?轨迹识别传感器工作原理直线行走①轨迹变量变为0②轨迹变量变为1③轨迹变量变为3④轨迹变量变为2⑤轨迹变量变为0行进方向牛刀小试 根据我们以前学习的知识,你能独自编写一个机器人沿直线行走(三种情况)的程序吗? 当机器人识别到轨迹,就高速前进; 当机器人没有识别到轨迹,就停止前进。曲线行走 机器人贴着轨迹的边缘走和在轨迹内部走都能达到“沿轨迹走”的效果。而且“贴着轨迹的边缘走”的方法更简单。小贴士轨迹变量==1左探头(看到)右探头(看不到)(表达式成立)小贴士机器人右转机器人左转左探头(看不到)右探头(看不到)(表达式不成立)轨迹变量==1崭露头角考验你的时候到啦! 谢谢聆听
相关课件
人教版三年级上册第6课 精彩课件助我学图片ppt课件: 这是一份人教版三年级上册第6课 精彩课件助我学图片ppt课件,共7页。PPT课件主要包含了用课件辅助其他学习等内容,欢迎下载使用。
信息技术粤教版 (B版)第9课 沿轨迹行走的机器人备课ppt课件: 这是一份信息技术粤教版 (B版)第9课 沿轨迹行走的机器人备课ppt课件,共9页。PPT课件主要包含了可调电阻,光电发射管,光电接收管,动手搭建一展身手等内容,欢迎下载使用。
小学信息技术第9课 沿轨迹行走的机器人课堂教学课件ppt: 这是一份小学信息技术第9课 沿轨迹行走的机器人课堂教学课件ppt,共3页。PPT课件主要包含了可调电阻,光电发射管,光电接收管等内容,欢迎下载使用。