

还剩20页未读,
继续阅读
所属成套资源:粤高教版(2018)信息技术九年级全册课件PPT+教案
成套系列资料,整套一键下载
粤高教版 (2018)九年级全册第3课 让开源机器人动起来——为开源机器人编程备课ppt课件
展开
这是一份粤高教版 (2018)九年级全册第3课 让开源机器人动起来——为开源机器人编程备课ppt课件,共28页。PPT课件主要包含了智能小车,新知导入,新知讲解,一项目要求,项目分析,二实现思路,三所需器材,四所需软件,一电机扩展板,探究新知等内容,欢迎下载使用。
我们已经了解 Arduin开源机器人的硬件,机器人也被初步搭建起来了。现在我们开始编程驱动它,实现前进、后退及转弯,让它能逆时针走一个正方形。
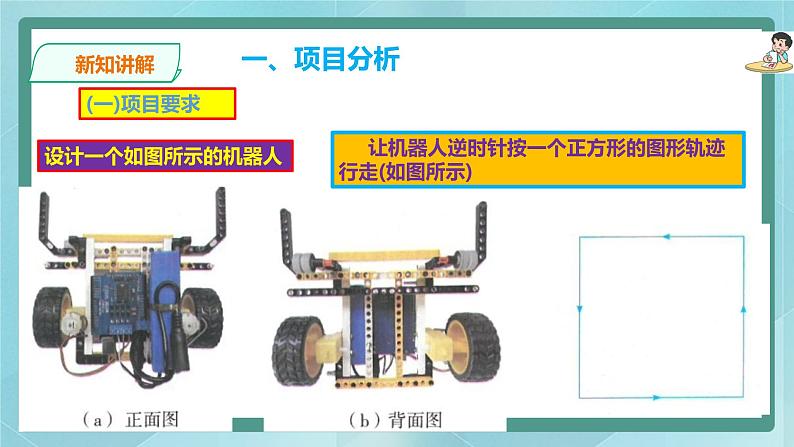
让机器人逆时针按一个正方形的图形轨迹行走(如图所示)
设计一个如图所示的机器人
1.在上一节课搭建的机器人的基础上,连接好线路。
2.编程实现让机器人前进5秒,然后向左转弯90度。重复直行、左转弯4次这样的步骤,从而实现机器人按一个正方形图形轨迹逆时针行走。
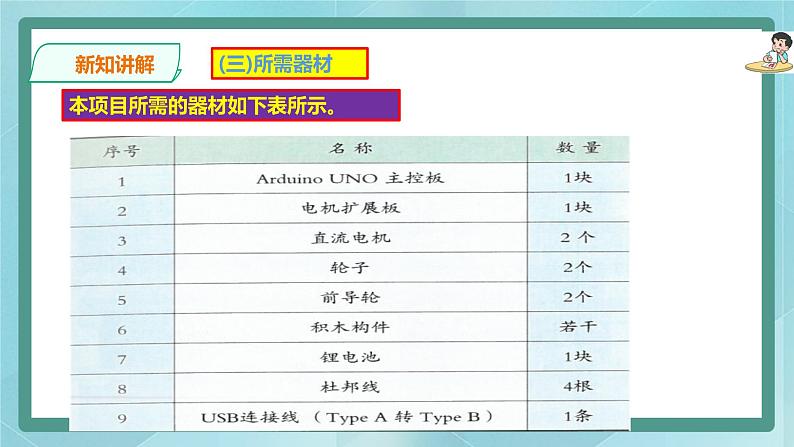
本项目所需的器材如下表所示。
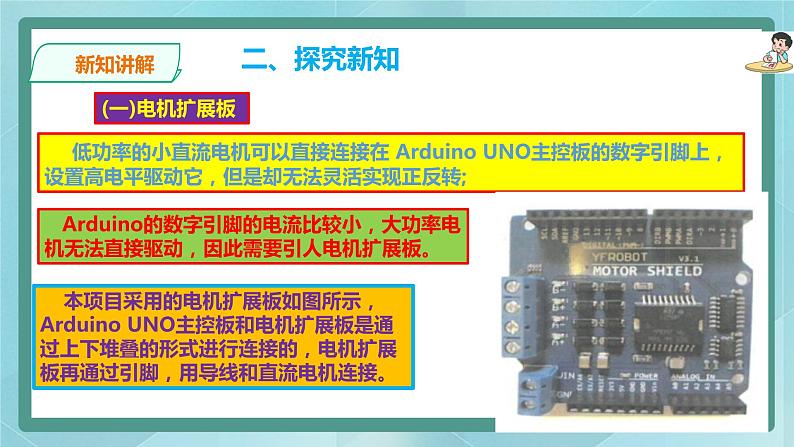
低功率的小直流电机可以直接连接在 Arduin UNO主控板的数字引脚上,设置高电平驱动它,但是却无法灵活实现正反转;
Arduin的数字引脚的电流比较小,大功率电机无法直接驱动,因此需要引人电机扩展板。
本项目采用的电机扩展板如图所示, Arduin UNO主控板和电机扩展板是通过上下堆叠的形式进行连接的,电机扩展板再通过引脚,用导线和直流电机连接。
电机扩展板上的接口VIN和GND是外接电源的正极和负极,输入电压范围为5~9V
电机扩展板的4个引脚的功能如表所示。
直流电机、电机扩展板和主控板的完整连接如图所示。
很多直流电机的正负极没有进行明显标识,因为大多数直流电机正负极都是可以反接的,改变电流的方向,电机的转向也随之改变。
安装上电机扩展板的“智能小车”外观如图所示。
组装好硬件后,机器人还不能运行,我们可以用EdUArduin2.0内嵌的 ArduBlck流程图编程工具编写程序驱动它。
电机的速度值可设置为-255~+255,负值表示后退,正值表示前进,0表示停止。
电机的转向可以通过调整电机的正负极接线顺序,使速度的正负值和转向保持一致,方便编程。
参照下图,编程实现机器人前进2秒,然后再后退2秒。
一般地,把机器人的左电机接在A引脚、右电机接在B引脚。
B引脚连接的电机对应编程图形模块的电机M2。
上述程序为何写在设定模块里面,而不是写在循环模块里面?如果把上述程序放在如图所示的循环模块里面,会出现什么情况?
放在设定模块里,小车只执行一次程序。放在循环模块里,小车重复执行程序
设置机器人左电机的速度大于右电机的速度,观察机器人行走的情况;设置机器人左电机的速度小于右电机的速度,观察机器人的行走情况,将结果填入下表。
我们知道如何控制机器人前进和后退了,那如何实现转弯呢?
通过实践可知,当机器人左右电机存在一定的速度差,则机器人会偏离直线行走,当速度差大到一定值时,便实现转弯。
当左电机的速度小于右电机的速度,机器人左转;
当左电机的速度大于右电机的速度,机器人右转。
(a)原地直角左转。(b)前进中左转
图中的(a)和(b)程序都是实现机器人左转,请观察行走的轨迹,看有什么不同。
硬件的接线按下表所示进行
电机扩展板的A引脚连接机器人的左电机(左轮),对应编程软件的电机运行模块的电机编号M1
B引脚连接右电机(右轮),对应电机编号M2
机器人逆时针走正方形的算法流程如图所示。
因为机器人行走速度各有不同,要实现转弯90度,需要根据实际情况,调整转弯的实际延迟时间。
用 ArduBlck编程实现上面算法的程序,如图所示
在该程序中,变量n控制直行和转弯重复执行的次数
探究机器人实际运行的效果,把结果记录在下表中。
经过实际效果验证,我们发现,机器人会沿着一个正方形逆时针行走从而实现了该项目的设计要求。
1.驱动电机转动,需要用到如下哪组硬件( )Arduin主控板、电机扩展板、直流电机 B.电机扩展板、直流电机C. Arduin主控板、传感器扩展板、直流电机 D.电机扩展板、传感器扩展板、直流电机2.关于电机扩展板,下面说法正确的是( )A.大功率的电机不需要电机扩展板也可以驱动B.电机扩展板可以用来驱动大功率的电机C.电机扩展板的引脚是和 Arduin主控板的模拟端口连接的D.电机扩展板驱动大功率电机一般不用外接电源
一、项目分析(一)项目要求(二)实现思路(三)所需器材(四)所需软件二、探究新知(一)电机扩展板(二)驱动电机
三、项目实施(一)硬件安装(二)算法设计(三)编写程序(四)效果检验
我们已经了解 Arduin开源机器人的硬件,机器人也被初步搭建起来了。现在我们开始编程驱动它,实现前进、后退及转弯,让它能逆时针走一个正方形。
让机器人逆时针按一个正方形的图形轨迹行走(如图所示)
设计一个如图所示的机器人
1.在上一节课搭建的机器人的基础上,连接好线路。
2.编程实现让机器人前进5秒,然后向左转弯90度。重复直行、左转弯4次这样的步骤,从而实现机器人按一个正方形图形轨迹逆时针行走。
本项目所需的器材如下表所示。
低功率的小直流电机可以直接连接在 Arduin UNO主控板的数字引脚上,设置高电平驱动它,但是却无法灵活实现正反转;
Arduin的数字引脚的电流比较小,大功率电机无法直接驱动,因此需要引人电机扩展板。
本项目采用的电机扩展板如图所示, Arduin UNO主控板和电机扩展板是通过上下堆叠的形式进行连接的,电机扩展板再通过引脚,用导线和直流电机连接。
电机扩展板上的接口VIN和GND是外接电源的正极和负极,输入电压范围为5~9V
电机扩展板的4个引脚的功能如表所示。
直流电机、电机扩展板和主控板的完整连接如图所示。
很多直流电机的正负极没有进行明显标识,因为大多数直流电机正负极都是可以反接的,改变电流的方向,电机的转向也随之改变。
安装上电机扩展板的“智能小车”外观如图所示。
组装好硬件后,机器人还不能运行,我们可以用EdUArduin2.0内嵌的 ArduBlck流程图编程工具编写程序驱动它。
电机的速度值可设置为-255~+255,负值表示后退,正值表示前进,0表示停止。
电机的转向可以通过调整电机的正负极接线顺序,使速度的正负值和转向保持一致,方便编程。
参照下图,编程实现机器人前进2秒,然后再后退2秒。
一般地,把机器人的左电机接在A引脚、右电机接在B引脚。
B引脚连接的电机对应编程图形模块的电机M2。
上述程序为何写在设定模块里面,而不是写在循环模块里面?如果把上述程序放在如图所示的循环模块里面,会出现什么情况?
放在设定模块里,小车只执行一次程序。放在循环模块里,小车重复执行程序
设置机器人左电机的速度大于右电机的速度,观察机器人行走的情况;设置机器人左电机的速度小于右电机的速度,观察机器人的行走情况,将结果填入下表。
我们知道如何控制机器人前进和后退了,那如何实现转弯呢?
通过实践可知,当机器人左右电机存在一定的速度差,则机器人会偏离直线行走,当速度差大到一定值时,便实现转弯。
当左电机的速度小于右电机的速度,机器人左转;
当左电机的速度大于右电机的速度,机器人右转。
(a)原地直角左转。(b)前进中左转
图中的(a)和(b)程序都是实现机器人左转,请观察行走的轨迹,看有什么不同。
硬件的接线按下表所示进行
电机扩展板的A引脚连接机器人的左电机(左轮),对应编程软件的电机运行模块的电机编号M1
B引脚连接右电机(右轮),对应电机编号M2
机器人逆时针走正方形的算法流程如图所示。
因为机器人行走速度各有不同,要实现转弯90度,需要根据实际情况,调整转弯的实际延迟时间。
用 ArduBlck编程实现上面算法的程序,如图所示
在该程序中,变量n控制直行和转弯重复执行的次数
探究机器人实际运行的效果,把结果记录在下表中。
经过实际效果验证,我们发现,机器人会沿着一个正方形逆时针行走从而实现了该项目的设计要求。
1.驱动电机转动,需要用到如下哪组硬件( )Arduin主控板、电机扩展板、直流电机 B.电机扩展板、直流电机C. Arduin主控板、传感器扩展板、直流电机 D.电机扩展板、传感器扩展板、直流电机2.关于电机扩展板,下面说法正确的是( )A.大功率的电机不需要电机扩展板也可以驱动B.电机扩展板可以用来驱动大功率的电机C.电机扩展板的引脚是和 Arduin主控板的模拟端口连接的D.电机扩展板驱动大功率电机一般不用外接电源
一、项目分析(一)项目要求(二)实现思路(三)所需器材(四)所需软件二、探究新知(一)电机扩展板(二)驱动电机
三、项目实施(一)硬件安装(二)算法设计(三)编写程序(四)效果检验
相关课件
信息技术九年级全册第5课 制作会巡线走的机器人——灰度传感器及其应用图片ppt课件: 这是一份信息技术九年级全册第5课 制作会巡线走的机器人——灰度传感器及其应用图片ppt课件,共25页。PPT课件主要包含了送餐机器人,新知导入,新知讲解,一项目要求,项目分析,二实现思路,三所需器材,四所需软件,一灰度传感器,探究新知等内容,欢迎下载使用。
初中第4课 制作“害羞”机器人——超声波传感器及其应用图片ppt课件: 这是一份初中第4课 制作“害羞”机器人——超声波传感器及其应用图片ppt课件,共24页。PPT课件主要包含了机器人走迷宫,新知导入,新知讲解,一项目要求,项目分析,二实现思路,三所需器材,四所需软件,一超声波传感器,探究新知等内容,欢迎下载使用。
信息技术九年级全册第2课 动手搭建机器人——认识与安装开源机器人硬件背景图课件ppt: 这是一份信息技术九年级全册第2课 动手搭建机器人——认识与安装开源机器人硬件背景图课件ppt,共21页。PPT课件主要包含了新知导入,新知讲解,一项目要求,项目分析,二实现思路,三所需器材,探究新知,超声波传感器,直流电机,电机扩展板等内容,欢迎下载使用。











