

还剩9页未读,
继续阅读
所属成套资源:川教版信息技术九年级下册PPT课件+素材全套
成套系列资料,整套一键下载
川教版(2019)九年级下册第3节 安防机器人的制作实践精品ppt课件
展开
这是一份川教版(2019)九年级下册第3节 安防机器人的制作实践精品ppt课件,共17页。PPT课件主要包含了课堂导入,搭建机器人小车,功能调试,课堂小结等内容,欢迎下载使用。
同学们:我们已经明确了安防机器人小车的巡逻方案,并且搭建好编程环境,下面就一起来动手实践吧。
能设计、搭建机器人小车,掌握机器人系统的接线方法。
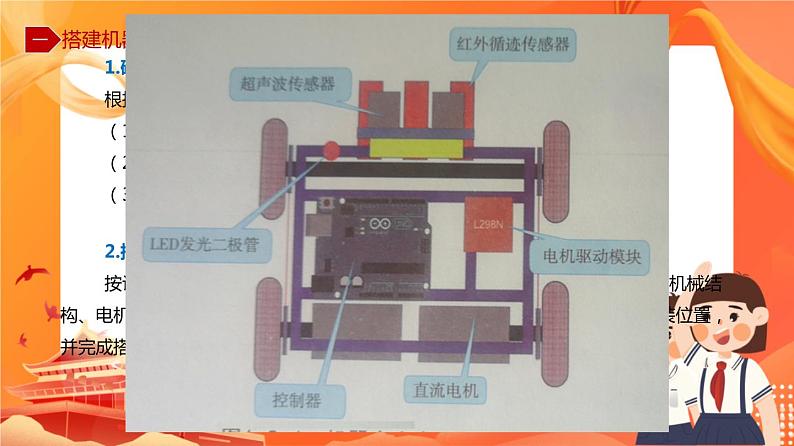
1.确立搭建要求根据现有条件确定机器人小车的设计要求,如:(1)由于电机功率所限,小车自重不宜过重。(2)小车车架要预留传感器等功能单元的安装位置。(3)要保证小车运行过程中各零部件不脱落、不相互干扰。
2.搭建机器人小车按设计要求,结合技术选型,完成城市安防机器人小车的设计,包括确定机械结构、电机固定、传动方式、传感器以及Arduin控制器和电机驱动模块等的安装位置,并完成搭建,如图所示。
3.系统接线将准备好的杜邦线按要求将各传感器、电机、电源等与控制器连接起来。
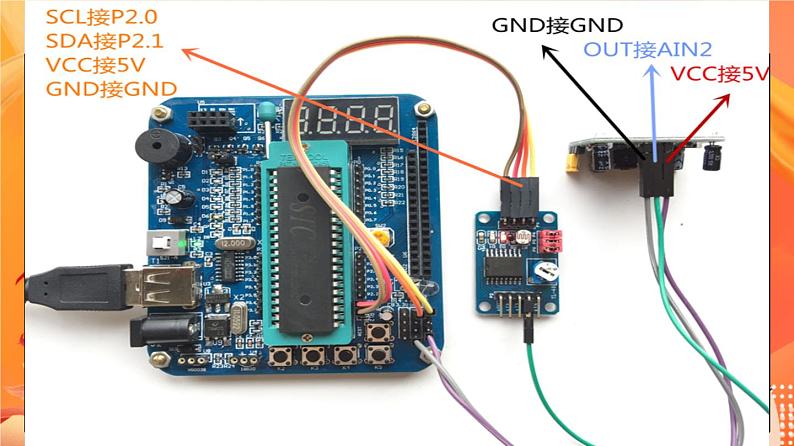
(1)接入传感系统请照下表中所列传感器与控制器端口的对应关系,完成传感器与控制器的接线操作。
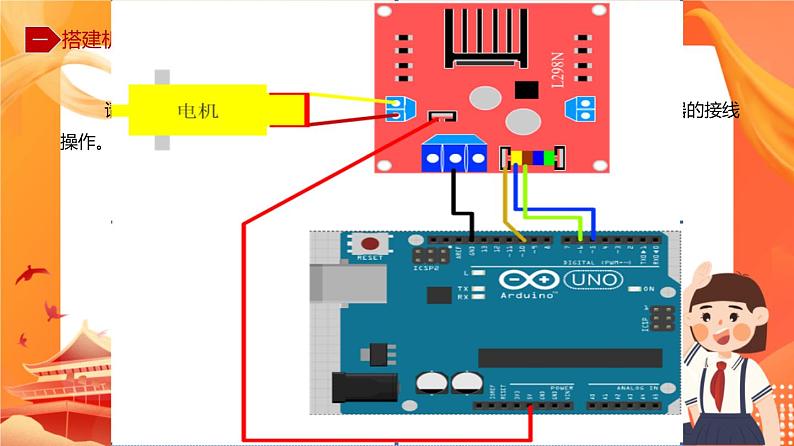
(2)电机驱动与电机的接线请照下表中所列驱动模块与控制器端口的对应关系,完成电机驱动与控制器的接线操作。
接线完成后,为保证机器人小车能正常运行,还需要对各功能单元逐一进行编程调试。
1.红外循迹传感器工作调试通过“串口监视器”调试红外循迹传感器的感应距离。选择“串口”模块中的“打印(自动换行)”等子模块。选择“输入/输出”模块中的数字输入“数字输入 管脚”子模块,选择好管脚,程序设计如下图:
将Arduin控制器与电脑用USB线连接,检查控制器型号和对应的串口号,上传调试程序。
将机器人小车放在规划有黑线的场地上,通过“串口监视器”的数据调整红外循迹传感器与场地地面的距离。
观察与发现:请完成自己的机器人小车红外循迹模块的调试,并观察红外循迹传感器检测到黑线时,返回的值是“1”还是“0”。
观察与发现:改变“打印文本”的文本模块中的空格的多少,观察串口监视器窗口的显示,看看有什么变化。
2.超声波传感器工作调试
通过“串口监视器”观察超声波传感器的检测距离是否正常,程序如下图:
机器人小车通过L298N电机驱动模块驱动控制两个直流电机,由于直流电机存在顺时针或逆时针转动的可能,因此在编写程序前,应调试好左右电机的转动方向,也可以通过编程来调整电机的转动方向,以保证机器人小车的直行、转弯、停止等动作能顺利完成,基础程序如下图:
小提示:可以通过调整左右电机的接线方式来改变电机的转动方向。
思考并填表:如何通过编程来控制机器人小车的转向?思考后填写下表:
安防机器人的制作实践(一)
1.确立搭建要求2.搭建机器人小车3.系统接线:接入传感系统、电机驱动及电机的接线
1.红外循迹传感器工作调试2.超声波传感器工作调试3.电机工作调试
同学们:我们已经明确了安防机器人小车的巡逻方案,并且搭建好编程环境,下面就一起来动手实践吧。
能设计、搭建机器人小车,掌握机器人系统的接线方法。
1.确立搭建要求根据现有条件确定机器人小车的设计要求,如:(1)由于电机功率所限,小车自重不宜过重。(2)小车车架要预留传感器等功能单元的安装位置。(3)要保证小车运行过程中各零部件不脱落、不相互干扰。
2.搭建机器人小车按设计要求,结合技术选型,完成城市安防机器人小车的设计,包括确定机械结构、电机固定、传动方式、传感器以及Arduin控制器和电机驱动模块等的安装位置,并完成搭建,如图所示。
3.系统接线将准备好的杜邦线按要求将各传感器、电机、电源等与控制器连接起来。
(1)接入传感系统请照下表中所列传感器与控制器端口的对应关系,完成传感器与控制器的接线操作。
(2)电机驱动与电机的接线请照下表中所列驱动模块与控制器端口的对应关系,完成电机驱动与控制器的接线操作。
接线完成后,为保证机器人小车能正常运行,还需要对各功能单元逐一进行编程调试。
1.红外循迹传感器工作调试通过“串口监视器”调试红外循迹传感器的感应距离。选择“串口”模块中的“打印(自动换行)”等子模块。选择“输入/输出”模块中的数字输入“数字输入 管脚”子模块,选择好管脚,程序设计如下图:
将Arduin控制器与电脑用USB线连接,检查控制器型号和对应的串口号,上传调试程序。
将机器人小车放在规划有黑线的场地上,通过“串口监视器”的数据调整红外循迹传感器与场地地面的距离。
观察与发现:请完成自己的机器人小车红外循迹模块的调试,并观察红外循迹传感器检测到黑线时,返回的值是“1”还是“0”。
观察与发现:改变“打印文本”的文本模块中的空格的多少,观察串口监视器窗口的显示,看看有什么变化。
2.超声波传感器工作调试
通过“串口监视器”观察超声波传感器的检测距离是否正常,程序如下图:
机器人小车通过L298N电机驱动模块驱动控制两个直流电机,由于直流电机存在顺时针或逆时针转动的可能,因此在编写程序前,应调试好左右电机的转动方向,也可以通过编程来调整电机的转动方向,以保证机器人小车的直行、转弯、停止等动作能顺利完成,基础程序如下图:
小提示:可以通过调整左右电机的接线方式来改变电机的转动方向。
思考并填表:如何通过编程来控制机器人小车的转向?思考后填写下表:
安防机器人的制作实践(一)
1.确立搭建要求2.搭建机器人小车3.系统接线:接入传感系统、电机驱动及电机的接线
1.红外循迹传感器工作调试2.超声波传感器工作调试3.电机工作调试
相关课件
初中信息技术川教版(2019)九年级下册第3节 安防机器人的制作实践课堂教学课件ppt: 这是一份初中信息技术川教版(2019)九年级下册第3节 安防机器人的制作实践课堂教学课件ppt,共35页。PPT课件主要包含了任务二等内容,欢迎下载使用。
川教版(2019)九年级下册第2节 实践操作 实施机器人项目完美版ppt课件: 这是一份川教版(2019)九年级下册第2节 实践操作 实施机器人项目完美版ppt课件,共19页。PPT课件主要包含了课堂导入,课堂小结等内容,欢迎下载使用。
2021学年第3节 跌倒救助机器人完美版课件ppt: 这是一份2021学年第3节 跌倒救助机器人完美版课件ppt,共27页。PPT课件主要包含了课堂导入,课堂小结等内容,欢迎下载使用。











