

还剩19页未读,
继续阅读
所属成套资源:川教版信息技术九年级下册PPT课件+素材全套
成套系列资料,整套一键下载
2021学年第3节 跌倒救助机器人完美版课件ppt
展开
这是一份2021学年第3节 跌倒救助机器人完美版课件ppt,共27页。PPT课件主要包含了课堂导入,课堂小结等内容,欢迎下载使用。
当前,很多国家都面临人口老龄化的问题,老龄人口不断增加。而很多老年人都有跌倒的经历,据统计跌倒是造成伤害死亡的第四大因素,在65岁以上的老年人中则为首要因素。造成死亡的主要原因是老年人在跌倒后没有及时得到救治,耽误了最佳抢救时间。我们可以设计一个机器人来解决这个问题:准确、快速地检测老年人跌倒的发生并及时予以救助,以降低跌倒对老年人造成的伤害。
1. 掌握运动传感器、蜂鸣器等器件的使用方法。
2. 能设计、搭建一个跌倒救助机器人模型,并编写程序实现功能。
一、项目分析,方案确定
二、系统搭建,功能实现
本项目研究的问题是检测跌倒的发生,并在人跌倒后及时发出告警信号并及时救助。那么,如何检测到跌倒的发生呢?
(1)跌倒检测分析后发现,人的跌倒是一个复杂的运动过程,且速度会发生快速变化。在运动学中,描述速度改变快慢的物理量称为加速度;重力对自由下落的物体产生的加速度,称为重力加速度。人在跌倒时,在竖直方向受重力影响,其加速度会发生变化,可以通过检测加速度的突变来检测跌倒事件的发生。
思考:请和本小组的同学们一起分析,人的跌倒是怎样的运动过程,在跌倒过程中还有哪些物理量发生了变化?
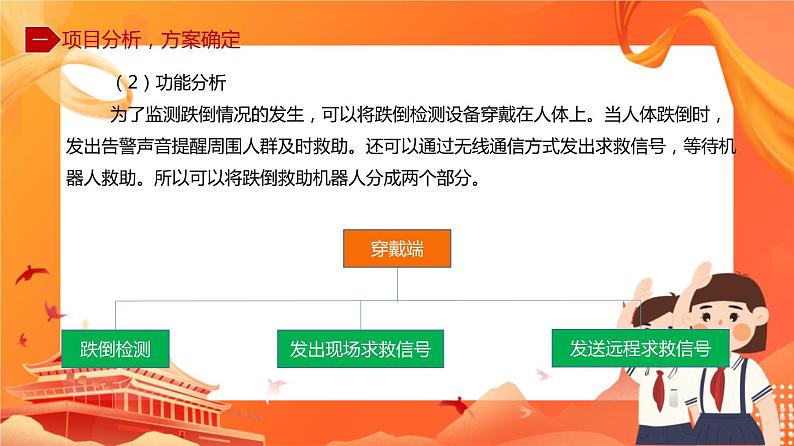
(2)功能分析为了监测跌倒情况的发生,可以将跌倒检测设备穿戴在人体上。当人体跌倒时,发出告警声音提醒周围人群及时救助。还可以通过无线通信方式发出求救信号,等待机器人救助。所以可以将跌倒救助机器人分成两个部分。
用加速度传感器检测跌倒事件的发生,用蜂鸣器发出告警声音,用蓝牙模块传输告警信号。
根据设计方案,穿戴端主要组成有Arduin控制器、MPU6050模块、蜂鸣器、蓝牙模块和背带。为便于封装和穿戴,可以使用Arduin扩展板进行器件集成。
基于跌倒救助机器人的基本结构和模块的使用方法,将Arduin控制器与MPU6050模块、蓝牙模块和蜂鸣器模块进行系统接线,如下图所示:
器件的针脚对应表如下所示:
(1)数据分析穿戴端的主要功能是检测跌倒事件的发生,可以利用MPU6050模块获取加速度的突然变化来检测跌倒。MPU6050模块可以获取三维空间版X、Y、Z三个轴向的加速度值,MPU6050的程序模块在“传感器”分组中可以找到。
在Mixly中,MPU6050的使用比较简单,可以通过串口监视器将加速度值显示出来,以供研究,如下图所示:
小提示:字符“\t”在Arduin IDE中表示的是制表符,在窗口会显示出一定的间隔。
小提示:在串口监视器中,可以使用Ctrl+C组合键,复制出监视器中选定的数据。
任务一:设计一组实验,模拟跌倒事件的发生,并且获取跌倒过程中三轴加速度变化的数据,使用数据分析软件进行分析,写出你认为可行的跌倒检测的算法。
(2)跌倒检测算法的设计我们来做一个跌倒实验,将穿戴端设备穿戴在模特身上,模拟人类跌倒。
下图展示跌倒实验中采集的数据,并使用Excel软件将数据用折线图表示出来。
任务二:请你认真分析跌倒实验数据分析折线图,提炼出图像的信息特征并加以解释。
从数据分析可以看出,在跌倒情况发生时,三个轴向的加速度都发生了剧烈波动。为简化检测,我们可以运用在单个轴向上(以Y轴为例),在跌倒时间内(按1s计算)求极值的方式来检测跌倒的发生。
思考:结合实验数据分析,思考和探究如下问题:1.基于实验,你们小组确定的告警阈值为多少?2.上图所示的算法有没有可以改进的地方?请提出你的想法。3.除了用极值的方式检测跌倒事件,还有其他算法吗?
(3)程序编写基于上面的分析,首先设计告警函数alarm( ),用于跌倒后使用蜂鸣器发出现场告警求救声音。对于发出蓝牙信号的功能将在后面补充。
依据本文稿21页所示算法设计跌倒检测与告警程序。
阈值需要根据跌倒实验的结果做调整
当前,很多国家都面临人口老龄化的问题,老龄人口不断增加。而很多老年人都有跌倒的经历,据统计跌倒是造成伤害死亡的第四大因素,在65岁以上的老年人中则为首要因素。造成死亡的主要原因是老年人在跌倒后没有及时得到救治,耽误了最佳抢救时间。我们可以设计一个机器人来解决这个问题:准确、快速地检测老年人跌倒的发生并及时予以救助,以降低跌倒对老年人造成的伤害。
1. 掌握运动传感器、蜂鸣器等器件的使用方法。
2. 能设计、搭建一个跌倒救助机器人模型,并编写程序实现功能。
一、项目分析,方案确定
二、系统搭建,功能实现
本项目研究的问题是检测跌倒的发生,并在人跌倒后及时发出告警信号并及时救助。那么,如何检测到跌倒的发生呢?
(1)跌倒检测分析后发现,人的跌倒是一个复杂的运动过程,且速度会发生快速变化。在运动学中,描述速度改变快慢的物理量称为加速度;重力对自由下落的物体产生的加速度,称为重力加速度。人在跌倒时,在竖直方向受重力影响,其加速度会发生变化,可以通过检测加速度的突变来检测跌倒事件的发生。
思考:请和本小组的同学们一起分析,人的跌倒是怎样的运动过程,在跌倒过程中还有哪些物理量发生了变化?
(2)功能分析为了监测跌倒情况的发生,可以将跌倒检测设备穿戴在人体上。当人体跌倒时,发出告警声音提醒周围人群及时救助。还可以通过无线通信方式发出求救信号,等待机器人救助。所以可以将跌倒救助机器人分成两个部分。
用加速度传感器检测跌倒事件的发生,用蜂鸣器发出告警声音,用蓝牙模块传输告警信号。
根据设计方案,穿戴端主要组成有Arduin控制器、MPU6050模块、蜂鸣器、蓝牙模块和背带。为便于封装和穿戴,可以使用Arduin扩展板进行器件集成。
基于跌倒救助机器人的基本结构和模块的使用方法,将Arduin控制器与MPU6050模块、蓝牙模块和蜂鸣器模块进行系统接线,如下图所示:
器件的针脚对应表如下所示:
(1)数据分析穿戴端的主要功能是检测跌倒事件的发生,可以利用MPU6050模块获取加速度的突然变化来检测跌倒。MPU6050模块可以获取三维空间版X、Y、Z三个轴向的加速度值,MPU6050的程序模块在“传感器”分组中可以找到。
在Mixly中,MPU6050的使用比较简单,可以通过串口监视器将加速度值显示出来,以供研究,如下图所示:
小提示:字符“\t”在Arduin IDE中表示的是制表符,在窗口会显示出一定的间隔。
小提示:在串口监视器中,可以使用Ctrl+C组合键,复制出监视器中选定的数据。
任务一:设计一组实验,模拟跌倒事件的发生,并且获取跌倒过程中三轴加速度变化的数据,使用数据分析软件进行分析,写出你认为可行的跌倒检测的算法。
(2)跌倒检测算法的设计我们来做一个跌倒实验,将穿戴端设备穿戴在模特身上,模拟人类跌倒。
下图展示跌倒实验中采集的数据,并使用Excel软件将数据用折线图表示出来。
任务二:请你认真分析跌倒实验数据分析折线图,提炼出图像的信息特征并加以解释。
从数据分析可以看出,在跌倒情况发生时,三个轴向的加速度都发生了剧烈波动。为简化检测,我们可以运用在单个轴向上(以Y轴为例),在跌倒时间内(按1s计算)求极值的方式来检测跌倒的发生。
思考:结合实验数据分析,思考和探究如下问题:1.基于实验,你们小组确定的告警阈值为多少?2.上图所示的算法有没有可以改进的地方?请提出你的想法。3.除了用极值的方式检测跌倒事件,还有其他算法吗?
(3)程序编写基于上面的分析,首先设计告警函数alarm( ),用于跌倒后使用蜂鸣器发出现场告警求救声音。对于发出蓝牙信号的功能将在后面补充。
依据本文稿21页所示算法设计跌倒检测与告警程序。
阈值需要根据跌倒实验的结果做调整
相关课件
初中川教版(2019)第3节 评价交流 展示机器人成果优秀ppt课件: 这是一份初中川教版(2019)第3节 评价交流 展示机器人成果优秀ppt课件,共21页。PPT课件主要包含了课堂导入,课堂小结等内容,欢迎下载使用。
川教版(2019)九年级下册第2节 实践操作 实施机器人项目完美版ppt课件: 这是一份川教版(2019)九年级下册第2节 实践操作 实施机器人项目完美版ppt课件,共19页。PPT课件主要包含了课堂导入,课堂小结等内容,欢迎下载使用。
川教版(2019)九年级下册第1节 确定项目 规划机器人方案完美版课件ppt: 这是一份川教版(2019)九年级下册第1节 确定项目 规划机器人方案完美版课件ppt,共28页。PPT课件主要包含了课堂导入,课堂小结等内容,欢迎下载使用。











