
资料中包含下列文件,点击文件名可预览资料内容
还剩12页未读,
继续阅读
所属成套资源:中考物理实验与探究专题训练(全国通用)
成套系列资料,整套一键下载
专题11 简单的机械和功- 中考物理实验与探究专题训练(全国通用)
展开
这是一份专题11 简单的机械和功- 中考物理实验与探究专题训练(全国通用),文件包含专题11简单的机械和功解析版docx、专题11简单的机械和功原卷版docx等2份试卷配套教学资源,其中试卷共46页, 欢迎下载使用。
专题11简单的机械和功(解析版)
一.实验探究题(共20小题)
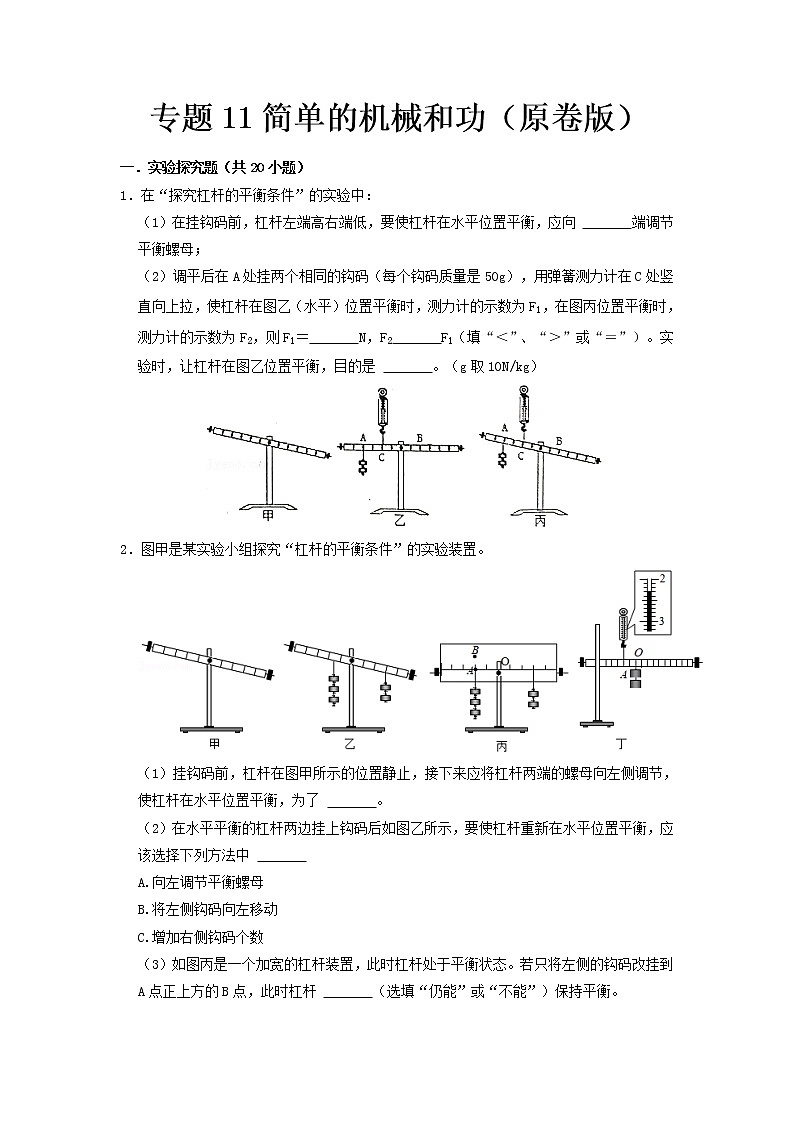
1.在“探究杠杆的平衡条件”的实验中:
(1)在挂钩码前,杠杆左端高右端低,要使杠杆在水平位置平衡,应向 左 端调节平衡螺母;
(2)调平后在A处挂两个相同的钩码(每个钩码质量是50g),用弹簧测力计在C处竖直向上拉,使杠杆在图乙(水平)位置平衡时,测力计的示数为F1,在图丙位置平衡时,测力计的示数为F2,则F1= 2 N,F2 = F1(填“<”、“>”或“=”)。实验时,让杠杆在图乙位置平衡,目的是 为了便于测量力臂 。(g取10N/kg)
【分析】(1)调节杠杆平衡的原则是螺母的调节方向是向上翘的那端调节;
(2)知道动力臂、阻力、阻力臂,根据杠杆平衡条件F1L1=F2L2求出动力,即为测力计的示数;
力臂指的是支点到力的作用点的距离,杠杆平衡条件:动力×动力臂=阻力×阻力臂,根据杠杆平衡的条件可解决题目;
实验时要调节杠杆在水平位置平衡,使杠杆平衡的目的是便于测量力臂。
【解答】解:(1)杠杆重心右移应将平衡螺母向左调节,直至重心移到支点处;
(2)设杠杆一个小格代表L,根据杠杆平衡条件F1L1=F2L2知,
F1×2L=2×0.05kg×10N/kg×4L,解得F1=2N;
做实验时,如图丙所示的杠杆已达到平衡。当杠杆由图乙的位置变成图丙的位置时,其动力臂、阻力臂的比值是不变的,所以在阻力不变的情况下,动力是不变的,所以F2=F1;
实验时,施加的动力和阻力的方向都是竖直方向,此时力与力臂垂直,可从杠杆的标尺上直接读出对应的力臂,即这样操作是为了便于测量力臂。
故答案为:(1)左;(2)2;=;为了便于测量力臂。
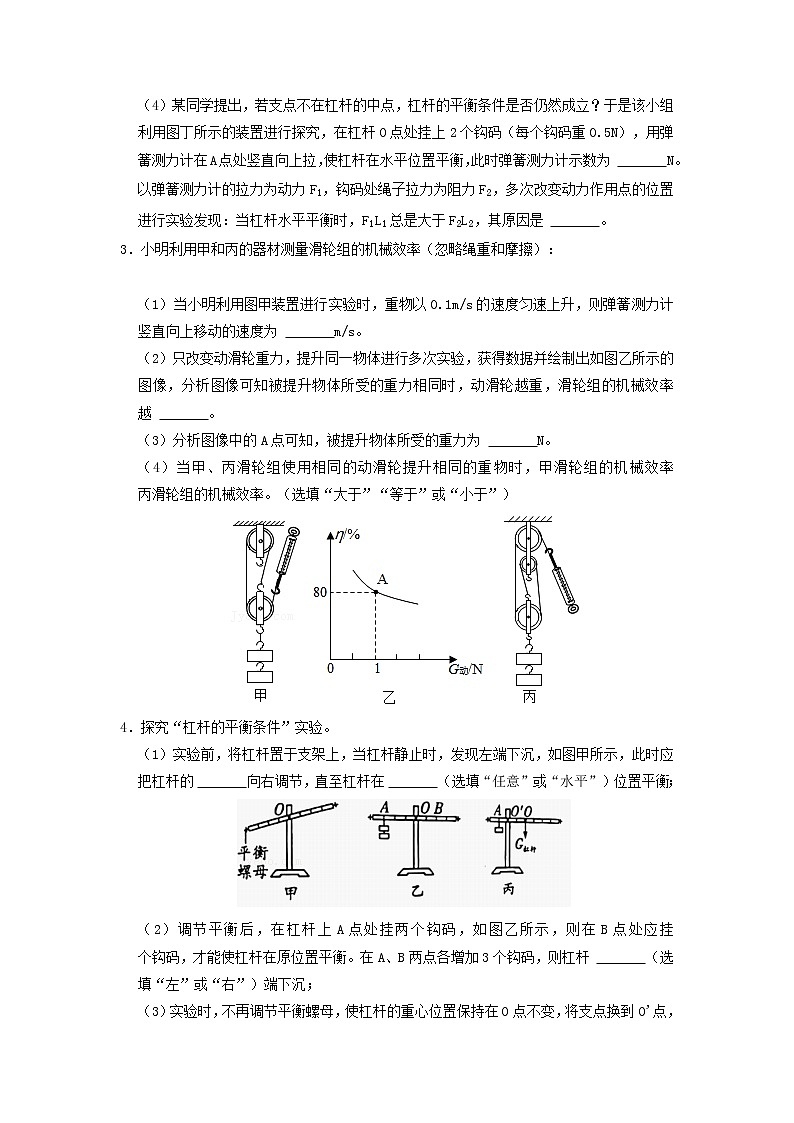
2.图甲是某实验小组探究“杠杆的平衡条件”的实验装置。
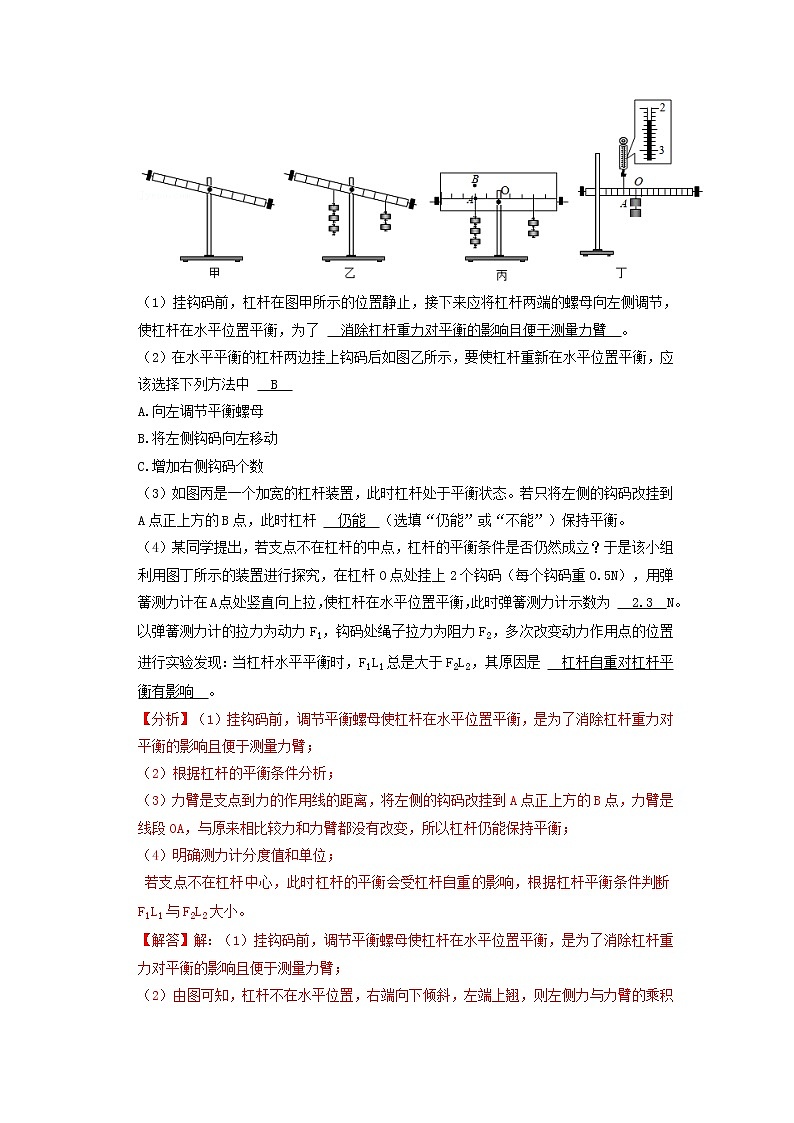
(1)挂钩码前,杠杆在图甲所示的位置静止,接下来应将杠杆两端的螺母向左侧调节,使杠杆在水平位置平衡,为了 消除杠杆重力对平衡的影响且便于测量力臂 。
(2)在水平平衡的杠杆两边挂上钩码后如图乙所示,要使杠杆重新在水平位置平衡,应该选择下列方法中 B
A.向左调节平衡螺母
B.将左侧钩码向左移动
C.增加右侧钩码个数
(3)如图丙是一个加宽的杠杆装置,此时杠杆处于平衡状态。若只将左侧的钩码改挂到A点正上方的B点,此时杠杆 仍能 (选填“仍能”或“不能”)保持平衡。
(4)某同学提出,若支点不在杠杆的中点,杠杆的平衡条件是否仍然成立?于是该小组利用图丁所示的装置进行探究,在杠杆O点处挂上2个钩码(每个钩码重0.5N),用弹簧测力计在A点处竖直向上拉,使杠杆在水平位置平衡,此时弹簧测力计示数为 2.3 N。以弹簧测力计的拉力为动力F1,钩码处绳子拉力为阻力F2,多次改变动力作用点的位置进行实验发现:当杠杆水平平衡时,F1L1总是大于F2L2,其原因是 杠杆自重对杠杆平衡有影响 。
【分析】(1)挂钩码前,调节平衡螺母使杠杆在水平位置平衡,是为了消除杠杆重力对平衡的影响且便于测量力臂;
(2)根据杠杆的平衡条件分析;
(3)力臂是支点到力的作用线的距离,将左侧的钩码改挂到A点正上方的B点,力臂是线段OA,与原来相比较力和力臂都没有改变,所以杠杆仍能保持平衡;
(4)明确测力计分度值和单位;
若支点不在杠杆中心,此时杠杆的平衡会受杠杆自重的影响,根据杠杆平衡条件判断F1L1与F2L2大小。
【解答】解:(1)挂钩码前,调节平衡螺母使杠杆在水平位置平衡,是为了消除杠杆重力对平衡的影响且便于测量力臂;
(2)由图可知,杠杆不在水平位置,右端向下倾斜,左端上翘,则左侧力与力臂的乘积要小于右侧力与力臂的乘积;
A、在实验的过程中,不能通过调节平衡螺母使杠杆在水平位置平衡,故A错误;
B、将左侧钩码向左移动,左侧的力不变,力臂变大,则左侧力与力臂的乘积变大,会使杠杆平衡,故B正确;
C、增加右侧钩码个数,右侧的力臂不变,力变大,力与力臂的乘积变大,杠杆不会平衡,故C错误。
故选:B;
(3)力臂是支点到力的作用线的距离,将左侧的钩码改挂到A点正上方的B点,力的作用线没有变化,力臂是线段OA,与原来相比较力和力臂都没有改变,所以杠杆仍能保持平衡;
(4)分度值为0.1N,弹簧测力计示数为2.3N;
图丁中,设杠杆的重力为G,力臂为LG,当杠杆平衡时,根据杠杆的平衡条件:F1L1=F2L2+GLG,
由丁图可知LG≠0,所以杠杆自重对杠杆平衡有影响,此时F1L1>F2L2。
故答案为:(1)消除杠杆重力对平衡的影响且便于测量力臂;(2)B;(3)仍能;(4)2.3;杠杆自重对杠杆平衡有影响。
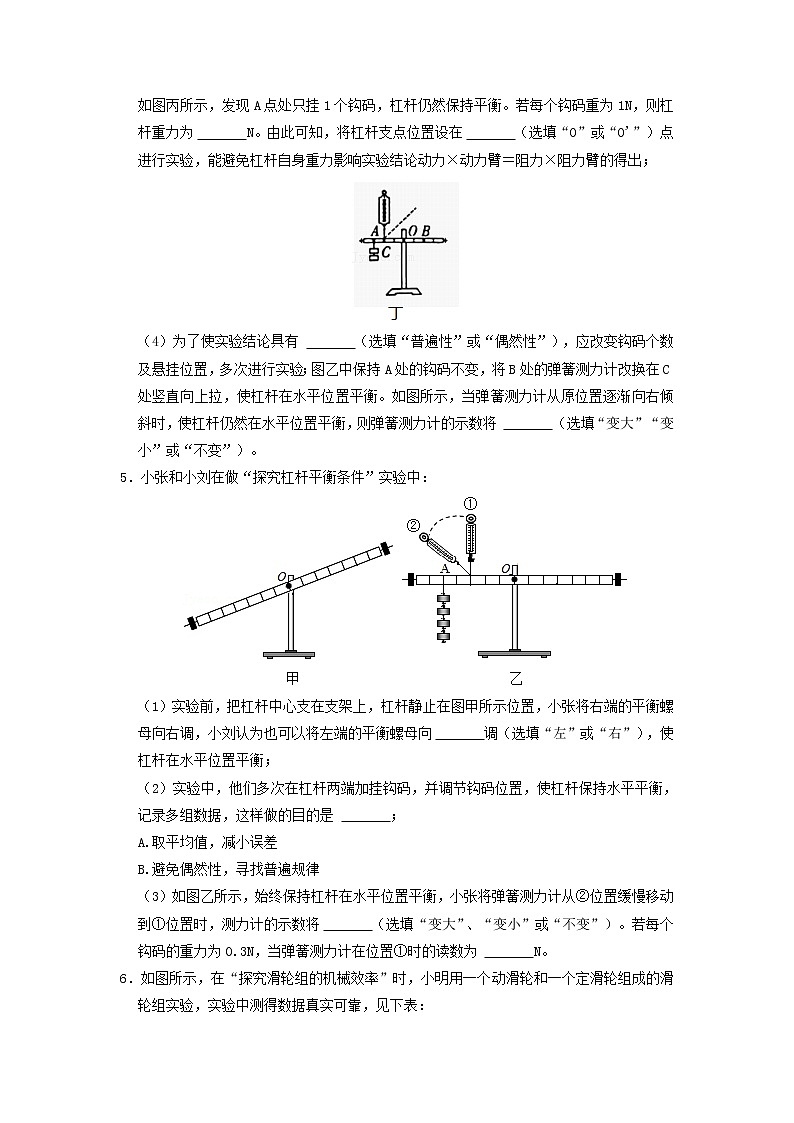
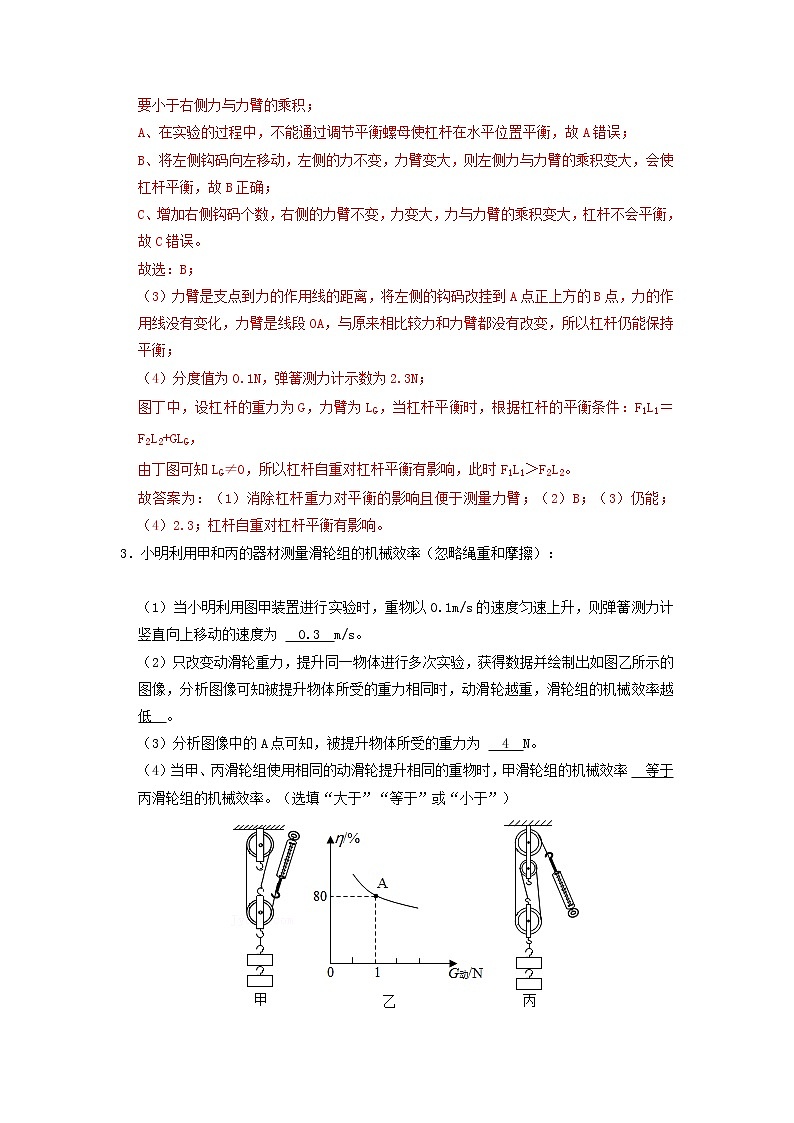
3.小明利用甲和丙的器材测量滑轮组的机械效率(忽略绳重和摩擦):
(1)当小明利用图甲装置进行实验时,重物以0.1m/s的速度匀速上升,则弹簧测力计竖直向上移动的速度为 0.3 m/s。
(2)只改变动滑轮重力,提升同一物体进行多次实验,获得数据并绘制出如图乙所示的图像,分析图像可知被提升物体所受的重力相同时,动滑轮越重,滑轮组的机械效率越 低 。
(3)分析图像中的A点可知,被提升物体所受的重力为 4 N。
(4)当甲、丙滑轮组使用相同的动滑轮提升相同的重物时,甲滑轮组的机械效率 等于 丙滑轮组的机械效率。(选填“大于”“等于”或“小于”)
【分析】(1)由图甲可知滑轮组绳子的有效股数,根据v绳=nv物求出弹簧测力计竖直向下移动的速度;
(2)根据图像得出机械效率与动滑轮重的关系,然后得出相应的结论;
(3)忽略绳重和摩擦,提升物体重力所做的功为有用功,提升物体和动滑轮重力所做的功为总功,根据η=×100%表示出滑轮组的机械效率,然后结合A点的数据求出被提升物体的重力;
(4)若忽略绳重及摩擦,则克服动滑轮重做的功为额外功的唯一来源,他们做的有用功相同,因此总功相同,由η=×100%分析。
【解答】解;(1)由图可知,n=3,则弹簧测力计竖直向上移动的速度v绳=nv物=3×0.1m/s=0.3m/s;
(2)根据图乙可知,被提升物体所受的重力相同时,动滑轮越重,滑轮组的机械效率越低;
(3)忽略绳重和摩擦,提升物体重力所做的功为有用功,提升物体和动滑轮重力所做的功为总功,
所以,滑轮组的机械效率η===,
由图乙可知,G动=1N,η=80%,则80%=,
解得:G=4N;
(4)小红同学分别使用动滑轮重相同的甲、丙滑轮组提升相同的重物时,若忽略绳重及摩擦,则克服动滑轮重做的功为额外功,额外功相同,做的有用功相同,因此总功相同,由η=×100%,则甲、丙滑轮组的机械效率相同,甲滑轮组的机械效率等于丙滑轮组的机械效率。
故答案为:(1)0.3;(2)低;(3)4;(4)等于。
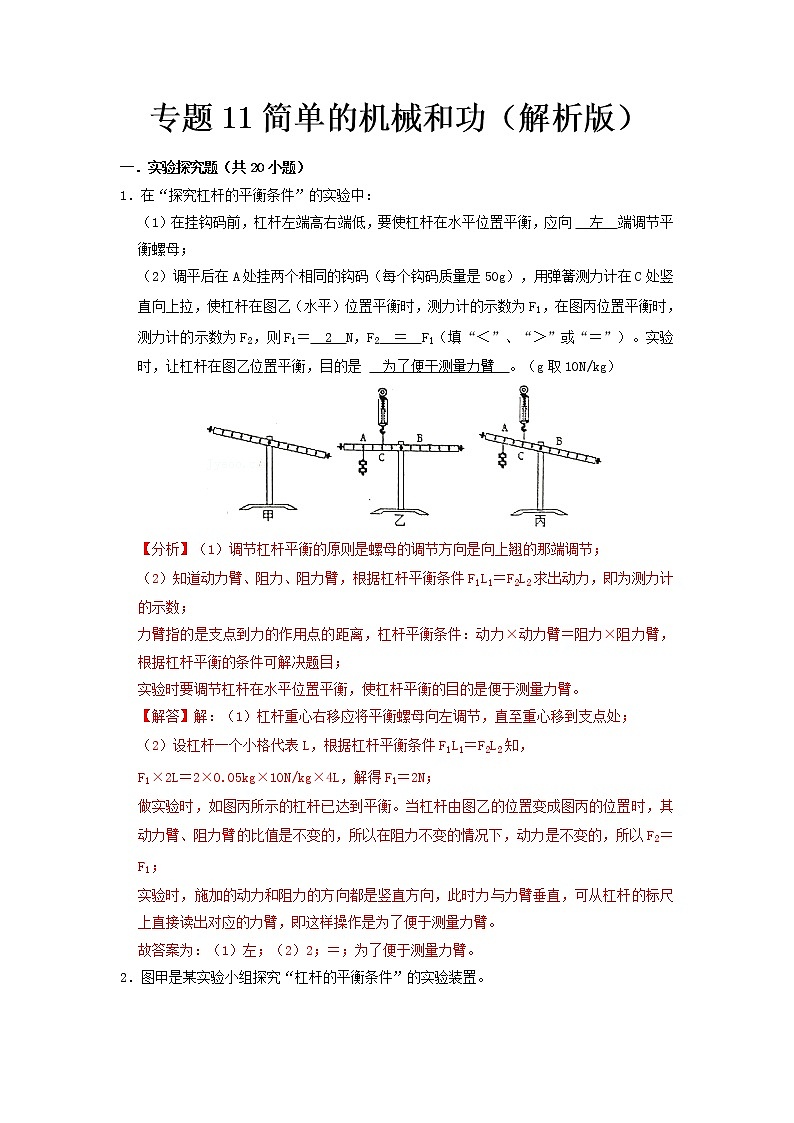
4.探究“杠杆的平衡条件”实验。
(1)实验前,将杠杆置于支架上,当杠杆静止时,发现左端下沉,如图甲所示,此时应把杠杆的 平衡螺母 向右调节,直至杠杆在 水平 (选填“任意”或“水平”)位置平衡;
(2)调节平衡后,在杠杆上A点处挂两个钩码,如图乙所示,则在B点处应挂 3 个钩码,才能使杠杆在原位置平衡。在A、B两点各增加3个钩码,则杠杆 左 (选填“左”或“右”)端下沉;
(3)实验时,不再调节平衡螺母,使杠杆的重心位置保持在O点不变,将支点换到O'点,如图丙所示,发现A点处只挂1个钩码,杠杆仍然保持平衡。若每个钩码重为1N,则杠杆重力为 0.5 N。由此可知,将杠杆支点位置设在 O (选填“O”或“O'”)点进行实验,能避免杠杆自身重力影响实验结论动力×动力臂=阻力×阻力臂的得出;
(4)为了使实验结论具有 普遍性 (选填“普遍性”或“偶然性”),应改变钩码个数及悬挂位置,多次进行实验;图乙中保持A处的钩码不变,将B处的弹簧测力计改换在C处竖直向上拉,使杠杆在水平位置平衡。如图所示,当弹簧测力计从原位置逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将 变大 (选填“变大”“变小”或“不变”)。
【分析】(1)当杠杆静止时,发现左端下沉,应把杠杆的平衡螺母向相反方向调节,直至杠杆在水平位置平衡;
(2)根据杠杆平衡条件做出解答;
(3)根据杠杆平衡条件得出杠杆的重力;
将杠杆的中心位置挂在支架上,可避免杠杆自重的影响;
(4)实验中为得出杠杆平衡条件的普遍规律,需多测几组数据进行分析;
分析操作中引起力臂的变化,根据杠杆平衡条件分析解题。
【解答】解:(1)当杠杆静止时,发现左端下沉,如图甲所示,此时,应把杠杆的平衡螺母向右调节,直至杠杆在水平位置平衡;
(2)设一个钩码重为G,一格为L,根据杠杆平衡条件可知:2G×3L=nG×2L,所以n=3,需在B点挂3个钩码;
在A、B两点各增加3个钩码,左侧变为5G×3L=15GL,右侧变为6G×2L=12GL,故杠杆不能平衡,向左端下沉;
(3)设杠杆的重力为G,每一格的长度为L.则每一格的重力为,支点O′左侧的部分的杠杆重=,力臂为L,右侧部分重=,力臂为3L,
根据杠杆平衡条件可知:1N×L+×L=×3L,解出G=0.5N,
将杠杆的中心位置挂在支架上,可避免杠杆自重的影响,故将杠杆支点位置设在O点进行实验
(4)多次改变力和力臂的大小,得到了多组实验数据,得出了杠杆平衡条件。该实验测多组数据的目的是为了得出的结论更具有普遍性;
当弹簧测力计在原位置逐渐向右倾斜时,F1的力臂减小,F2L2乘积不变,要使杠杆仍然在水平位置平衡,弹簧测力计的拉力将增大,即弹簧测力计的示数将变大。
故答案为:(1)平衡螺母;水平;(2)3;左;(4)普遍性;变大。
5.小张和小刘在做“探究杠杆平衡条件”实验中:
(1)实验前,把杠杆中心支在支架上,杠杆静止在图甲所示位置,小张将右端的平衡螺母向右调,小刘认为也可以将左端的平衡螺母向 右 调(选填“左”或“右”),使杠杆在水平位置平衡;
(2)实验中,他们多次在杠杆两端加挂钩码,并调节钩码位置,使杠杆保持水平平衡,记录多组数据,这样做的目的是 B ;
A.取平均值,减小误差
B.避免偶然性,寻找普遍规律
(3)如图乙所示,始终保持杠杆在水平位置平衡,小张将弹簧测力计从②位置缓慢移动到①位置时,测力计的示数将 变小 (选填“变大”、“变小”或“不变”)。若每个钩码的重力为0.3N,当弹簧测力计在位置①时的读数为 2 N。
【分析】(1)杠杆处于静止状态或匀速转动状态时,杠杆处于平衡状态;调节杠杆在水平位置平衡,平衡螺母向上翘的一端移动。
(2)只用一组数据得到结论,偶然性太大,因此应获取多组实验数据找普遍规律从而得出杠杆平衡条件。
(3)当弹簧测力计斜着拉时,其力臂变小,根据杠杆平衡条件分析出答案。根据杠杆平衡条件F1L1=F2L2可求测力计的示数。
【解答】解:(1)如图甲,杠杆左端下沉,杠杆的右端上翘,应将杠杆重心向右移,所以应将两端的平衡螺母(左端和右端的均可)向右调节,使杠杆在水平位置平衡;
(2)探究杠杆平衡的条件时,多次改变力和力臂的大小主要是为了获取多组实验数据归纳出物理规律,使结论具有普遍性,故B正确;
(3)将弹簧测力计从②位置缓慢移动到①位置时,阻力和阻力臂不变,拉力F力臂变大,由杠杆平衡条件可知,测力计的示数将变小;
设每个小格的长度为L,每个钩码的重力为G,测力计在位置①时,根据杠杆平衡的条件有:
4G×5L=F×3L,
解得拉力:
F===2N,
即弹簧测力计在位置①时的读数为2N。
故答案为:(1)右;(2)B;(3)变小;2。
6.如图所示,在“探究滑轮组的机械效率”时,小明用一个动滑轮和一个定滑轮组成的滑轮组实验,实验中测得数据真实可靠,见下表:
(1)请根据表中数据,在图中画出实验中滑轮组的绕绳方法。
(2)表格中编号①处数据应填 66.7 ,此次实验做的总功是 0.6 J。
(3)由表中第1、2组数据可知,同一滑轮组的机械效率与 物体被提升的高度 无关。
(4)分析表中第1、3、4组数据,你得出的本实验结论是:同一滑轮组匀速提升重物时,机械效率随 被提升的物重 的增加而增大。
实验次数
物重G/N
钩码上升高度
h/m
动力F/N
动力作用点移动
距离s/m
滑轮组的机械
效率η/%
I
1
0.1
0.7
0.3
47.6
2
1
0.2
0.7
0.6
47.6
3
2
0.1
Ll
0.3
60.6
4
4
0.1
2
0.3
①
【分析】(1)根据h与s的关系(s=nh)结合表格中数据判断承担物重的绳子段数,然后绕线;
(2)根据公式η=×100%=×100%计算第四次的机械效率,根据W总=Fs可求总功;
(3)分析机械效率的变化及前面物理量的变化得出结论,机械效率与物体被提升的高度无关;
(4)分析3、4中机械效率和物理量的变化,得出机械效率与被提升的物重之间的关系。
【解答】解:
(1)由实验数据可知,s=3h,所以滑轮组由3段绳子承担物重,因此绳子应从动滑轮上面的挂钩开始绕起,如图所示:
;
(2)第4次实验的机械效率:η=×100%=×100%=×100%≈66.7%;
此次实验做的总功是:
W总=Fs=2N×0.3m=0.6J;
(3)由第1、2组数据可知,动滑轮重、钩码重均相同,钩码被提升的高度不同,但机械效率相同,可知同一滑轮组的机械效率与物体被提升的高度无关;
(4)由第1、3、4组数据可知,动滑轮重、钩码被提升的高度相同,被提升的钩码重不同,机械效率不同,物重越大,机械效率越大,故结论为:同一滑轮组匀速提升重物时,机械效率随被提升的物的增加而增大。
故答案为:(1)见上图;(2)66.7;0.6;(3)物体被提升的高度;(4)被提升的物重。
7.物理实验小组的同学利用图中的装置探究杠杆平衡的条件,每个钩码的质量相等,杠杆上的刻度均匀。
(1)实验前,如图甲所示,此时的杠杆 是 (选填“是”或“不是”)处于平衡状态。实验中使杠杆在水平位置平衡,这样做的好处是便于直接测量 力臂 。
(2)他们完成一次操作后,实验现象如图乙所示,记录的数据为动力F1=1.5N,动力臂l1=0.1m,阻力F2=1N,则阻力臂l2=0.15m。于是甲同学就得出了“动力×动力臂=阻力×阻力臂”的结论,乙同学认为他的结论不一定科学,理由是 一组实验数据太少,具有偶然性,不能作为普遍规律 。
(3)他们继续进行实验,在杠杆平衡后,他们在图丙所示的A位置挂上3个钩码,为了使杠杆仍在水平位置平衡,这时应在B位置挂上 4 个相同的钩码。
(4)如图丁,用弹簧测力计代替右侧钩码,沿与水平方向成30°角斜向下拉杠杆,保持杠杆在水平位置平衡。若把左侧钩码的拉力作为阻力,右侧弹簧测力计的拉力作为动力,此时的杠杆是 费力 杠杆(选填“省力”“费力”或“等臂”),请在乙图中画出此时拉力F的力臂l。
【分析】(1)杠杆静止或匀速转动时都属于平衡状态。
探究杠杆平衡条件时,使杠杆在水平位置平衡,这样方便测量力臂,支点在杠杆的中点是为了消除杠杆的自重;
(2)探究杠杆平衡条件时,一般要进行多次测量,为了使实验结论具有普遍性,只有一次实验得出的结论是不科学的;
(3)根据杠杆的平衡条件:F1L1=F2L2可求出钩码的个数;
(4)动力臂大于阻力臂是省力杠杆;过支点向力的作用线作垂线,画出此时拉力F的力臂L。
【解答】解:(1)杠杆静止或匀速转动时都属于平衡状态,如图杠杆是静止状态,此时杠杆是平衡状态;
实验中使杠杆在水平位置平衡,这样做的好处是便于测量力臂;
(2)只有一次实验得出杠杆平衡的条件是:动力×动力臂=阻力×阻力臂,这种结论很具有偶然性,不合理,要进行多次实验,总结杠杆平衡条件;
(3)设一格为L,一个钩码重G,则有3G×4L=nG×3L,解得n=4,故应在B处挂6个钩码;
(4)如图乙,用弹簧测力计代替右侧钩码,沿与水平方向成30°角斜向下拉杠杆,保持杠杆在水平位置平衡。若把左侧钩码的拉力作为阻力,右侧弹簧测力计的拉力作为动力,画出此时拉力F的力臂L,每个小格长L0,如下图:
L=×3L0=1.5L0<2L0,动力臂小于阻力臂是费力杠杆。
故答案为:(1)是;力臂;(2)一组实验数据太少,具有偶然性,不能作为普遍规律;(3)4;(4)费力;图见解答;
8.在探究“杠杆的平衡条件”实验中,所用的实验器材如图所示。
(1)小明先把杠杆的中点挂在支架上,杠杆静止在图甲所示的位置时,为了把杠杆调水平,应将左端的平衡
螺母向 右 调。
(2)调节杠杆两端的平衡螺母,使杠杆恰好在水平位置平衡,目的是 消除杠杆自重的影响 。
(3)做三次实验的目的是 寻找杠杆平衡的普遍规律 。三次实验中,当杠杆在水平位置平衡后,所挂钩码如图乙所示,分析可以得出实验结论是 F1L1=F2L2 。
(4)同学们交流后,发现本实验中杠杆的支点始终在中间,从而提出,如果杠杆的支点在一端是否也能得出同样的结论呢?要想解决此问题,需要增加一个器材是 弹簧测力计 。
【分析】(1)杠杆倾斜时,杠杆的重心偏向杠杆下沉的一端,左、右两端的螺母(或一端的螺母)要向杠杆上翘的一端调节;
(2)调节好以后,仍要使杠杆平衡,是为了便于测量力臂的长度;
(3)初中物理用实验探究物理问题时要进行多次实验,有的是为了多次测量求平均值来减小误差;有的是多次测量发现变化规律;有的是为了使实验结论具有普遍性;杠杆的平衡条件:F1L1=F2L2;
(4)如果杠杆的支点在一端,那么需要弹簧测力计向上的拉力。
【解答】解:(1)杠杆的右端上翘,左端的平衡螺母或右端的平衡螺母都向上翘的右端移动,才能使杠杆在水平位置平衡;
(2)杠杆在水平位置平衡,这样做是为了消除杠杆自重的影响;
(3)改变支点两侧的钩码位置和个数,一般要做三次实验,得到三组数据并进行分析,得出的实验结论具有普遍性,避免偶然性;
杠杆平衡满足的条件是:F1L1=F2L2;
(4)本实验中杠杆的支点始终在中间,如果杠杆的支点在一端得出同样的结论,需要增加一个器材是弹簧测力计,向上的拉力。
故答案为:(1)右;(2)消除杠杆自重的影响;(3)寻找杠杆平衡的普遍规律;F1L1=F2L2;(4)弹簧测力计。
9.某实验小组在做“探究杠杆的平衡条件”实验。
(1)实验前,某同学将杠杆置于支架上,当杠杆静止时,发现杠杆左端下沉,如图甲所示,为了在实验过程中方便测量力臂,接下来应将平衡螺母向 右 移动,直至杠杆在水平位置平衡;
(2)调节杠杆水平平衡后,在杠杆A点处挂3个钩码,如图乙所示,则在B点处挂 4 个钩码,才能使杠杆在水平位置平衡。若将两端同时减少一个钩码,杠杆会 顺时针 (选填“顺时针”或“逆时针”)旋转;
(3)如图丙,将弹簧测力计从第一种位置改变到第二种位置,测力计的示数将 变大 (选填“变大”“变小”或“不变”);
(4)某同学在实验过程中发现当杠杆处于如图丁所示的状态时,杠杆也能保持水平平衡,此时杠杆属于 费力 (选填“省力”或“费力”)杠杆,请举出它在生活生产中的一个应用实例 钓鱼竿 。
【分析】(1)当杠杆静止时,发现左端下沉,应把杠杆的平衡螺母向相反方向调节,直至杠杆在水平位置平衡;
(2)根据杠杆平衡条件做出解答;
(3)根据操作中引起力臂的变化,根据杠杆平衡条件分析解题;
(4)动力臂小于阻力臂为费力杠杆。
【解答】解:(1)当杠杆静止时,发现左端下沉,如图1所示,此时,应把杠杆的平衡螺母向右调节,直至杠杆在水平位置平衡;
(2)设一个钩码重力为G,杠杆每一格的长度为L,在B点处应挂n个钩码,
根据杠杆平衡条件可知:3G×4L=nG×3L,所以n=4,需在B点挂4个钩码;
将图乙中的杠杆两端同时减去一个钩码,
杠杆的左端:2G×4L=8GL,
杠杆的右端:3G×3L=9GL,
所以杠杆的右端下沉,杠杆会顺时针旋转;
(3)弹簧测力计在B处竖直向下拉时,拉力的方向竖直向下与杠杆垂直,动力臂等于支点到力的作用点的距离;弹簧测力计在逐渐旋转过程中,拉力的方向不再与杠杆垂直,动力臂变小,阻力和阻力臂不变,根据杠杆平衡条件得,动力变大,则弹簧测力计的示数变大;
(4)由图丁可知此时L1<L2,故为费力杠杆,生活中常见的镊子、钓鱼竿等都是费力杠杆。
故答案为:(1)右;(2)4;顺时针;(3)变大;(4)费力;钓鱼竿(或镊子等)。
10.如图所示是小红同学探究影响斜面机械效率因素的实验装置,物体在沿斜面向上的拉力F作用下匀速向上运动。实验准备的器材有:三个质量不同的木块A、三个高度不同的长方体铁块C、刻度尺、弹簧测力计。
实验序号
重物G/N
弹簧测力计示数F/N
重物沿斜面移动得距离L/m
重物上升得高度h/m
机械效率η/%
1
2.0
1.51
0.80
0.40
66.2
2
2.5
1.89
0.80
0.40
66.1
3
3.0
2.26
0.80
0.40
66.4
(1)上面的表格是小红探究斜面机械效率与物重的关系时记录的有关数据,通过分析数据,你可以得出结论是 斜面的机械效率与物重无关 ;
(2)上述实验中,保持斜面长度不变,将斜面高度改为0.2m,把一个重3N木块沿斜面匀速向上拉时,所需拉力为1.5N,则此过程中拉力所做的功为 1.2 J,物体受到的摩擦力为 0.75 N,此过程中木块的机械能 变大 (选填“变大”、“变小”或“不变”),斜面的机械效率为 50 %,由此可知斜面的机械效率与斜面的倾斜程度 有关 (选填“有关”或“无关”);
(3)选择合适的木块A及铁块C后,斜面机械效率变为70%,此时匀速向上拉动A时,需要的拉力4N,则此时选择的物体A重力为 3 N。
【分析】(1)分析表中数据知:斜面粗糙程度、斜面高、斜面长不变,改变物重,机械效率不变;
(2)克服重力做的功为有用功W有,拉力做的功为总功W总,则W额=W总﹣W有;根据W额=fs求出摩擦力的大小;根据η=×100%求出斜面的机械效率;机械能等于动能和势能的总和,动能的大小与质量、速度有关,重力势能的大小与质量和高度有关;
(3)根据机械效率公式写出表达时,根据机械效率小于1求出重力的取值范围。
【解答】解:(1)根据表格中的数据可知,机械效率的数值不同,但差别极其微小,由于实验中存在误差,所以我们认为机械效率是相同的;由数据可知,斜面的倾斜程度和斜面的粗糙程度均相同,在改变物重时,机械效率不变,说明斜面的机械效率与物重无关;
(2)保持斜面长度不变,将斜面高度改为0.2m,把一个重3N物体沿斜面匀速向上拉时,所需拉力为1.5N,则所做的有用功为:W有=Gh=3N×0.2m=0.6J;
拉力做的总功为:W总=Fs=1.5N×0.8m=1.2J;
额外功为:W额=W总﹣W有=1.2J﹣0.6J=0.6J;
拉动物体上升的过程中,克服斜面的摩擦力所做的功为额外功,即W额=fs;此时物体受到的摩擦力为:f===0.75N;
匀速拉动物体上升的过程中,速度不变,动能不变,高度增大,重力势能变大,所以物体的机械能变大;
斜面的机械效率:η=×100%=×100%=50%;
保持斜面长度不变,将斜面高度改为0.2m,斜面的高度变小,斜面的机械效率变小,可以得到斜面的机械效率与斜面的倾斜程度有关;
(3)斜面的机械效率:η'====70%可知:==<1,所以物体重力范围为:G>2.8N;由表格数据可知物体重力为G=3N。
故答案为:(1)斜面的机械效率与物重无关;(2)1.2;0.75;变大;50;有关;(3)3。
11.如图所示是小明和小华探究“杠杆的平衡条件”的实验装置。
(1)实验前,将杠杆置于支架上,当杠杆静止时,如图甲所示,此时可以把右端的平衡螺母向 右 (选填“左”或“右”)调节,直至使杠杆在水平位置平衡;在后面的实验过程中 不能 (选填“能”或“不能”)再进行上述操作。
(2)如图乙,小明在实验时分别沿着竖直向下和斜向下两个方向拉弹簧测力计,都能使杠杆在水平位置平衡。同组的小华认为,竖直向下拉动测力计操作更方便,原因是 动力力臂可在杠杆上直接读出更加方便 。
(3)实验中,通过改变钩码和弹簧测力计的位置或钩码的个数来改变力臂或力的大小进行多次实验,目的是: 寻找普遍规律 。
(4)如图丙,调节好杠杆后在杠杆左边距离支点第3格处挂了4个钩码,每个钩码的重力均为0.5N,要使杠杆平衡,可以在支点右侧第4格A处挂个相同的钩码,或在左侧第2格B处竖直向拉动弹簧测力计,此时测力计的示数是 3 N。(杠杆上每小格等距)
(5)他们继续探究:保持钩码数量和位置不变,杠杆在水平位置平衡时,测出多组动力臂L1和动力F1的数据,绘制了L1﹣F1的关系图像,如图丁所示。请根据图像推算,当L1为25cm时,F1为 0.6 N。
【分析】(1)杠杆平衡调节原则是:右低将平衡螺母左调,左低将平衡螺母右调;
调节杠杆平衡后,在接下来的实验过程中不能再通过调节平衡螺母使杠杆在水平位置平衡;
(2)当拉力F向右倾斜时,分析出力臂的变化结合杠杆的平衡条件判断力的变化;
(3)通过实验总结实验结论时,一般要进行多次实验,如果只用一组数据得到结论,偶然性太大,因此应获取多组实验数据归纳出普遍的物理规律;
(4)根据杠杆的平衡条件:F 1L1=F2L2进行解答;
(5)由于保持A点钩码数量和力臂不变,根据F1L1=F2L2,可知F2L2为一定值,由图丙知求出这个不变的值求了当L1为25cm时F1大小。
【解答】解:(1)发现杠杆左端下沉,应把杠杆的平衡螺母向右调节,直至杠杆在水平位置平衡;
调节杠杆平衡后,在接下来的实验过程中不能再通过调节平衡螺母使杠杆在水平位置平衡;
(2)竖直向下拉动测力计操作更方便,原因是动力力臂可在杠杆上直接读出更加方便;
(3)通过实验总结归纳出物理规律时,一般要进行多次实验,获取多组实验数据归纳出物理规律才具有普遍性,结论才正确,所以在探究杠杆平衡的条件时,多次改变力和力臂的大小主要是为了获取多组实验数据归纳出物理规律;
(4)若杠杆上每个小格长度是L,根据杠杆的平衡条件有:4×0.5N×3L=F×2L,解得F=3N,
所以此时测力计的示数是3N;
(5)由于保持A点钩码数量和力臂不变,即阻力和阻力臂大小不变,根据F1L1=F2L2,可知F2L2为一定值,
由图丁知:F1L1=1N×0.15m=3N×0.05m=0.15N•m,
则当L1为25cm时,
拉力F1==0.6N。
故答案为:(1)右;不能;(2)动力力臂可在杠杆上直接读出更加方便;(3)寻找普遍规律;(4)3N;(5)0.6N。
12.利用如图的实验装置探究“杠杆的平衡条件”。
(1)将该装置置于水平桌面上,静止时如图甲所示,此时杠杆处于 平衡 (平衡/非平衡)状态,为完成实验,应将杠杆的左边的平衡螺母向 右 调,右边的平衡螺母应向 右 调。
(2)如图乙所示,杠杆在水平位置平衡,记录数据。根据这一次实验数据,小明立即分析得出杠杆的平衡条件,他这种做法的不足是 实验次数太少,得出的结论具有偶然性 。经老师提醒后,小明继续进行实验,如图乙,若将A、B两点下方挂的钩码同时朝靠近支点O方向移动一小格,则杠杆 右端下沉 (选填“仍保持平衡”、“左端下沉”或“右端下沉”)。
(3)如图丙所示,若不在B点挂钩码,可改用弹簧测力计在B点向下拉杠杆,当测力计从a位置转动到b位置时,使杠杆仍在水平位置平衡,其示数大小将 变大 。
(4)杆秤是我国古代对杠杆平衡条件的应用.小华用硬杆自制了一个杆秤,杆的粗细不均匀,将提纽固定在O点,提起提纽,托盘中不放重物,将秤砣移至O点左侧的B点,秤杆可以在水平位置平衡,如图丁所示。已知提纽与托盘间距离OA=10cm,OB=2cm,秤砣质量m=0.5kg。关于该杆秤,以下说法正确的是 C 。
A.秤的零刻线在O点
B.因杆粗细不均匀,所以秤的刻线分布也不均匀
C.秤的2kg刻度线在O点右侧C处,OC=38cm
D.称量物体质量时,若杆秤右端上扬,可将秤砣向左侧适当移动
【分析】(1)杠杆静止时或杠杆匀速转动时,杠杆处于平衡状态;在调节杠杆平衡时,将平衡螺母向较高的一端调节;
(2)经过一次实验得出的实验结论可能具有偶然性,要进行多次实验,使实验结论具有普遍性;
根据杠杆的平衡条件计算即可;
(3)当拉力F向右倾斜时,保持B点不动,弹簧测力计的方向向右倾斜,这时杠杆右侧的力臂变短,根据杠杆的平衡条件可知,使杠杆仍在水平位置平衡,则弹簧测力计的示数将变大;
(4)杆秤利用的是杠杆的平衡条件,通过力臂的大小关系得出物体重和秤砣重之间的关系,进而得出物体的质量与秤砣的质量之间的关系,测量的是物体的质量。
【解答】解:(1)杠杆平衡状态是指杠杆静止状态或杠杆匀速转动状态,图中杠杆处于静止状态,因而该杠杆处于平衡状态;
杠杆不在水平位置平衡,左端向下倾斜,则重心应向右移动,故应向右调节左端或右端的平衡螺母;
(2)根据图乙这一组数据不能得出杠杆平衡的条件的结论,因为实验次数太少,只有一组数据,实验具有偶然性;
设杠杆一格的长度为L,每个钩码重为G,乙图中杠杆恰好处于平衡状态,若悬挂钩码的挂点A和B分别同时向支点O移近一格,
则有:3G×L<2G×2L,故杠杆将会右端下沉;
(3)保持B点不变,若拉力F从a到b倾斜时,此时F的力臂变短,根据杠杆的平衡条件,弹簧测力计示数大小将变大;
(4)A、将提纽固定在O点,提起提纽,托盘中不放重物,将秤砣移至O点左侧的B点,秤杆可以在水平位置平衡,因此B点应该为零刻度线,故A错误;
B、无论杆秤粗细是否均匀,秤的刻度线分布都是均匀的,因为无论杆秤粗细是否均匀,由杠杆平衡条件F1L1=F2L2可知,动力臂与阻力的大小成正比,故B错误;
C、由题意知B点为零刻度线,则OA=10cm,OB=2cm,
利用支点左端力与力臂乘积的变化量等于右端力与力臂乘积变化量:m1g×OA﹣m2×OB=m2g×OC,
即2kg×10N/kg×10cm﹣0.5kg×10N/kg×2cm=0.5kg×10N/kg×OC,
解得:OC=38cm,故C正确;
D、秤杆右端上扬,即为左端重,应将秤砣向右移,增加力臂使其平衡,故D错误。
故选:C。
故答案为:(1)平衡;右;右;(2)实验次数太少,得出的结论具有偶然性;右端下沉;(3)变大;(4)C。
13.某同学看到建筑工地上矗立的塔吊,是用电动机来带动滑轮组提升重物的设备。如何可以提高滑轮组的机械效率呢?为此该同学们用如图所示的装置进行了实验探究,实验数据记录如表所示。
实验次数
钩码重力/N
钩码上升高度h/m
绳端拉力F/N
绳端移动距离s/m
机械效率η(%)
1
1
0.1
0.6
0.3
55.6
2
1
0.2
0.6
0.6
55.6
3
2
0.1
1
0.3
66.7
4
2
0.1
0.7
0.5
57.1
(1)实验中,应沿 竖直 方向 匀速 拉动弹簧测力计。
(2)分析表中数据可知:第4次实验是用图 丙 所示装置来完成的。
(3)(多选)根据以上结论,你认为下列措施可提高机械效率的是 AC 。
A.减轻动滑轮重
B.减少绳端移动的距离
C.适当增加所提物体重
D.适当增加重物上升高度
(4)实验表明:额外功越小,总功越接近有用功。进一步推理得出:假设没有额外功,总功等于有用功,可见使用任何机械都不省功。下列物理规律的得出运用了这种研究方法的是 B 。
A.平面镜成像的规律
B.牛顿第一定律
C.阿基米德原理
【分析】(1)实验时应沿竖直方向匀速拉动物体;
(2)由s=nh确定n的大小,据此判断第4次实验是用哪个图所示装置来完成的;
(3)根据影响滑轮组效率高低的因素分析答题;
(4)物理学中,常常有难以达到条件的时候,这时,我们常常需要借助将实验想象为理想情况下来达到我们的目的,在实验基础上经过概括、抽象、推理得出规律,这种研究问题的方法就叫科学推理法。
【解答】解:(1)为了准确测出滑轮组的机械效率,应使弹簧测力计沿竖直方向做匀速直线运动;
(2)在第四次实验中,s=0.5m,h=0.1m,由s=nh可得n=5,即承担物重的绳子股数n=5,所以第4次实验是用丙图所示装置来完成的;
(3)要提高滑轮组的机械效率,可以:
A、减轻动滑轮重力,在提升相同重物、提升相同高度时,减小额外功,而有用功不变,总功减小,有用功与总功的比值增大,提高了滑轮组的机械效率;故A正确;
B、滑轮组的机械效率η====,可见滑轮组的机械效率与绳端移动的距离无关,所以,减少绳端移动的距离,不能提高滑轮组的机械效率;故B错误;
C、适当增加所提物体重,可以增大有用功,而额外功不变,有用功与总功的比值增大,可以提高滑轮组的机械效率,故C正确;
D、滑轮组的机械效率η====,可见滑轮组的机械效率与提升物体的高度无关,所以,增加重物上升高度,不能提高滑轮组的机械效率;故D错误;
故选AC;
(4)实验表明:额外功越小,总功越接近有用功:进一步推理得出:假设没有额外功,总功等于有用功;可见使用任何机械不省功(采用了理想化推理法):
AC、平面镜成像的规律、阿基米德原理可通过实验直接验证;
B、而牛顿第一定律不能用实验直接验证,是在实验的基础下推理得出的;
故选B。
故答案为:(1)竖直;匀速;(2)丙;(3)AC;(4)B。
14.“探究杠杆平衡条件”的实验中,把杠杆的中点支在支架上,杠杆停在如图甲所示的位置,
(1)为了使杠杆在水平位置平衡,可以调节右端的平衡螺母,使它向 左 (填“左”或“右”)移动。
(2)调节好的杠杆,如图乙,用弹簧测力向上拉动杠杆使其水平平衡,若每个钩码重为2N,则弹簧测力计的读数为 2.4 N
(3)如图丙,当弹簧测力计由M位置倾斜至N位置时,用力使杠杆在水平位置处于平衡,弹簧测力计的示数将会变 大 ,这是因为 动力臂变小了 。
(4)实验中测得的数据如表所示
测量序号
动力F1/N
动力臂l1/cm
阻力F2/N
阻力臂l2/cm
①
1
20
2
10
②
2
15
1.5
20
③
3
5
1
15
有的同学按现有方案得出如下结论“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离。”这个结论与杠杆平衡条件不符,原因是实验过程中 B 。
A.没有改变力的大小
B.没有改变力的方向
C.没有改变力的作用点
D.没有改变平衡螺母的位置从而让杠杆在水平位置重新平衡。
【分析】(1)杠杆处于静止状态和匀速转动状态都称为杠杆平衡。为了使杠杆在水平位置平衡,平衡螺母向上翘的一端移动;
(2)根据动力×动力臂=阻力×阻力臂,可求得弹簧测力计的读数;
(3)根据动力×动力臂=阻力×阻力臂,阻力和阻力臂不变,动力臂变短,动力变大;
(4)从支点到动力作用线的垂直距离叫动力臂;从支点到阻力作用线的垂直距离叫阻力臂。
【解答】解:
(1)杠杆停在如图甲所示的位置,左端上翘,要使杠杆在水平位置处于平衡状态,平衡螺母向上翘的左端移动;
(2)根据动力×动力臂=阻力×阻力臂,可得3×2N×2L=F×5L,解得:F=2.4N。
(3)弹簧测力计在M位置时,力臂是红色的线段;弹簧测力计在N位置时,力臂是绿色的线段。根据动力×动力臂=阻力×阻力臂,阻力和阻力臂都不变,动力臂变短,动力变大,故弹簧测力计示数变大。
(4)“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,是在杠杆在水平位置平衡且动力和阻力的方向都是竖直向下的条件下得出的,也就是实验过程中没有改变动力或阻力的方向。故选项A、C、D错误,选项B正确。
故答案为:(1)左;(2)2.4;(3)大;动力臂变小了;(4)B。
15.在探究“杠杆的平衡条件”实验中,小华利用杠杆、细线、钩码等器材进行探究:
(1)在挂钩码前,调节杠杆在水平位置平衡,从实验的角度来讲,杠杆在这个位置平衡是为了方便读取 力臂 。
(2)如图甲所示,在杠杆左侧的A点挂上两个钩码,为了使杠杆保持平衡,在杠杆的右侧挂钩码时,是先确定细线位置再挂钩码还是先挂钩码再确定细线的位置? 先挂钩码再确定细线位置 。理由是 可以使力臂连续改变,便于调节杠杆在水平位置平衡 。
(3)杠杆在如图甲所示的位置平衡。小华多次在左右两侧各加挂等量钩码,并保持细线位置不变,发现杠杆每次都能平衡。通过记录上述实验数据,得出杠杆的平衡条件是:“只有支点左右两侧的力臂相等和力的大小也相等时,杠杆才能平衡”。同组的小强同学分析这一过程,指出小华得出的结论不可信!理由是 没有在力臂不相等或作用力不相等的情况下进行多次试验 。
(4)小强帮小华改进实验方法后,正确得出了杠杆的平衡条件。接着他们想测量一把均匀木尺的质量,器材有:木尺、支座、带细线的质量为M的钩码。请你根据图示完成下列实验。
①如图乙示,将木尺平放在支座上,左右移动木尺,使木尺在水平位置平衡,记下使木尺平衡的这个支点位置,这个位置就是木尺的 重心 ,记为O。
②如图丙示,将质量为M的钩码挂在木尺左边某一位置,移动木尺,直到木尺能够在支座上重新保持水平平衡,记录钩码悬挂点到支座的距离L1和O点到支座的距离L2;
③根据杠杆平衡的条件,可以计算出木尺的质量m= 。
【分析】(1)挂钩码前,调节杠杆在水平位置平衡,作用力的方向与杠杆垂直,则作用力的力臂在杠杆上,便于读取力臂的大小;
(2)如甲图所示,在左端A点挂钩码,为使杠杆平衡并能连续改变力臂大小,使杠杆再次平衡,则应先挂钩码再移动作用线的位置确定细线位置;
(3)为得出普遍的实验结论,应改变作用力的大小或改变力臂的大小,进行多次实验;
(4)①如图乙所示,木尺在支座上水平平衡,则支点的位置即为木尺的重心;③根据杠杆平衡条件,计算木尺的质量。
【解答】解:(1)挂钩码前,调节杠杆在水平位置平衡,即作用力的方向与杠杆垂直,则作用力的力臂在杠杆上,杠杆在这个位置平衡是为了方便读取力臂;
(2)如图甲所示,在杠杆A点挂两个钩码,为使杠杆平衡,在右端挂钩码时,为使连续改变力臂的大小,可先挂钩码再确定细线的位置;
(3)小华的实验结论不可信。其理由是小华在力臂或作用力相等的情况下实验,实验结论不具有普遍性,应在力臂不等或作用力不相等的情况下进行实验;
(4)①木尺在支座上水平位置平衡,则使木尺平衡的支座的位置即为木尺的重心;③根据杠杆平衡条件有:MgL1=mgL2,则木尺的质量m=。
故答案为:(1)力臂;(2)先挂钩再确定细线位置;可以使力臂连续改变,便于调节杠杆在水平位置平衡;(3)没有在力臂不相等或作用力不相等的情况下进行多次实验;(4)①重心;③。
16.在“探究杠杆平衡条件的实验”中:
(1)用图甲所示的装置进行实验。实验前,发现杠杆左端下沉,则应将左端的平衡螺母向 右 调节。实验时,在A点挂4个钩码(每个钩码重0.5N),要使杠杆在水平位置平衡,在B点竖直向下拉的弹簧测力计示数F1为 3 N。若弹簧测力计由竖直方向逐渐向左转动某一角度,杠杆仍保持水平平衡,此时弹簧测力计的示数为F2,则两者的大小关系为:F1 小于 F2;
(2)为帮助学生理解力臂,物理老师制作了图乙所示的“杠杆力臂演示仪”(杠杆自身重力和摩擦不计,固定装置未画出),杠杆在水平位置平衡,松开螺母保持OA不动,使OB向下折一个角度后,再拧紧螺母形成一根可绕O点转动的杠杆AOB'(B'点对应B点),保持G1位置不变,要使杠杆在图丙位置保持平衡,则G2应该移动到位置 C (选填字母);
A.B'点处
B.①点处
C.②点处
D.③点处
(3)学以致用:小明家有个木衣架,他把书包挂在衣架A处,已知木衣架重30N,衣架受到重力的作用线经过圆底盘的圆心,圆底盘直径30cm,其他数据如图,为防止木衣架倒下,书包最多重 45 N。
【分析】(1)实验前杠杆,左端向下沉,说明这一侧的力与力臂的乘积较大,故应向右调节平衡螺母;
在A点挂4个钩码,得出钩码的总重力,若每个小格长L,根据杠杆平衡条件F1L1=F2L2可得弹簧测力计的示数;
弹簧测力计由竖直方向逐渐向左转动某一角度,阻力和阻力臂不变,拉力的力臂变小,根据杠杆平衡条件可知,杠杆在水平位置平衡时,拉力的变化情况;
(2)保持G1位置不变,即左边的力和力臂不变,G2不变,要使杠杆在图丙位置保持平衡,应该使右边的力臂不变;原来G₂的力臂为OB,所以G2应该移动到②点处;
(3)衣架在即将倒下时,底盘右侧与地面的接触点为支点,阻力臂为底盘半径,得出L2′和动力臂L′1,
根据杠杆平衡条件可得动力大小,进而得出答案。
【解答】解:(1)实验前杠杆,左端向下沉,说明这一侧的力与力臂的乘积较大,故应向右调节平衡螺母,直到杠杆在水平位置平衡。
在A点挂4个钩码,则钩码的总重力G总=4×0.5N=2N,
若每个小格长L,根据杠杆平衡条件F1L1=F2L2可得,弹簧测力计的示数F1===3N;
弹簧测力计由竖直方向逐渐向左转动某一角度,阻力和阻力臂不变,拉力的力臂变小,根据杠杆平衡条件可知,杠杆在水平位置平衡时,拉力变大,所以F1<F2;
(2)保持G1位置不变,即左边的力和力臂不变,G2不变,要使杠杆在图丙位置保持平衡,应该使右边的力臂不变;原来G₂的力臂为OB,所以G2应该移动到②点处,故ABD不符合题意,C符合题意。
故选C。
(3)衣架在即将倒下时,底盘右侧与地面的接触点为支点,阻力臂为底盘半径,则L2′==15cm=0.15m,动力臂L′1=L﹣L2=25cm﹣15cm=10cm=0.1m,
根据杠杆平衡条件可得F1′==45N。
即书包最多重45N。
故答案为:(1)右;3;小于;(2)C;(3)45。
17.在探究滑轮组机械效率的实验中,实验数据表格如下:
序号
钩码重
G/N
钩码升高
的高度h/m
测力计
示数F/N
绳端移动的
距离s/m
有用功
W有/J
总功
W总/J
机械
效率η
第1次
2
①
1
0.3
②
③
66.7%
第2次
2
0.2
1
0.6
0.4
0.6
66.7%
第3次
4
0.1
1.6
0.3
0.4
0.48
83.3%
第1次实验时,先用测力计测出钩码的重力G;在如图,用测力计缓慢竖直拉绳端,提升钩码,读出测力计示数F,记下钩码升高的高度和绳端移动的距离。
(1)在图甲中,画出滑轮组最省力的绕线方式。
(2)表格中的数据为:① 0.1 ;② 0.3 ;③ 0.2 。
(3)要验证滑轮组机械效率与重物上升高度无关,需选哪几次实验数据作比较? 第1次、第2次 。
(4)根据第1、3次实验数据,写出提高滑轮组机械效率的方法: 增加提升物体的重力 。
【分析】(1)承担物重的绳子段数越多越省力;
(2)根据连接动滑轮绳子的段数和绳子自由端移动的距离,根据s=nh求出钩码上升的高度;根据W=Fs求总功,根据W=Gh求出有用功;
(3)验证滑轮组机械效率与重物上升高度是否有关时,应采用控制变量法;
(4)根据表格中的数据,利用控制变量法分析。
【解答】解:(1)要使滑轮组最省力,需要承担物重的绳子段数最多,所以要从动滑轮绕起如图所示:
;
(2)根据甲中的绕线方式可知,有3段绳子拉着动滑轮,则钩码上升的高度为:h===0.1m;
则有用功为:W有用=Gh=2N×0.1m=0.2J;总功为:W总=Fs=1N×0.3m=0.3J;
(3)要验证滑轮组机械效率与重物上升高度是否有关时,需要控制滑轮组的绕法相同、物体的重力相同,上升的高度不同,需选第1次、第2次实验数据作比较;
(4)根据第1、3次实验数据可知,钩码上升的高度相同,钩码的重力不同,钩码重力越高,机械效率越大,故增加提升物体的重力可以提高机械效率。
故答案为:(1)见解析;(2)0.1;0.3;0.2;(3)第1次、第2次;(4)增加提升物体的重力。
18.在“测量滑轮组的机械效率”实验中,小明用同一滑轮组进行了三次实验(如图所示),实验数据记录如表:
次数
钩码重/N
钩码上升距离/cm
弹簧测力计示数/N
弹簧测力计上升距离/cm
机械效率/%
1
2
10
0.8
30
83.3
2
4
10
1.5
30
★
3
6
10
2.2
30
90.9
(1)实验中要竖直向上缓慢 匀速 拉动弹簧测力计,使钩码升高。
(2)表格中★处数据应为 88.9 (结果保留一位小数)。
(3)分析以上实验数据可以得出结论:同一滑轮组的机械效率与 物重 有关。
(4)根据实验结论推测,使用该滑轮组将重8N的物体匀速提升10cm,此时滑轮组的机械效率可能 C 。
A.71.6%
B.82.4%
C.92.1%
D.100%
(5)另一实验小组改变动滑轮的重,提升同一物体进行多次实验,获得数据并绘制出如图丁的图象。分析可知:被提升物体所受的重力相同时,动滑轮越重,滑轮组机械效率越 低 (高/低);分析图象中的A点可知,此时被提升物体所受的重力 A 。
A.一定大于12N
B.等于12N
C.一定小于12N
【分析】(1)测滑轮组的机械效率,需要匀速拉动绳子,因为整个装置处于平衡状态测力计的示数等于拉力;
(2)利用滑轮组的机械效率η=%来计算;
(3)研究同一滑轮组提升重物时,滑轮组机械效率与提升物体的重力的关系时,要控制其它因素相同,只改变提升物体的重力;
(4)依据同一滑轮组,物重越大机械效率越高判断;
(5)依据滑轮组机械效率与动滑轮重有关进行分析;忽略绳重和摩擦,滑轮组的机械效率η===;即可求出被提升物体所受的重力。
【解答】(1)测滑轮组的机械效率,需要匀速拉动绳子,并且要在拉动中读弹簧测力计的示数此时整个系统处于平衡状态,拉力大小等于测力计示数;
(2)滑轮组的机械效率η=%=×100%=88.9%;
(3)分析表格数据可知,三次实验机械效率不同是由于物重不同造成的;
(4)同一滑轮组,物重越大机械效率越高,故物重8N时机械效率大于物重6N时的机械效率90.9%;而任何机械的效率不可能达到100%;故选C;
(5)由图丁可知,物重一定时,动滑轮越重机械效率越低;根据图丁可知,当动滑轮重为4N时,滑轮组的机械效率为75%;
若忽略绳重和摩擦,滑轮组的机械效率η=====;
即:75%=
所以,被提升物体所受的重力:G=12N;
但由于绳重和摩擦力使得额外功变大,根据η==知,在机械效率不变时,额外功增大,有用功也增大,若提升相同的高度,物体的重力会大于12N,故A正确。
故答案为:(1)匀速;(2)88.9;(3)物重;(4)C;(5)低;A。
19.某小组在“测滑轮组机械效率的实验”中得到的数据如表所示,实验装置如图所示。
实验
序号
钩码重
量G/N
钩码上升
高度h/m
绳端拉
力F/N
绳端移动
距离s/m
机械效率
η
1
4
0.1
2.7
0.2
74%
2
4
0.1
1.8
0.3
74%
3
8
0.1
3.1
0.3
86%
4
8
0.1
2.5
① 0.4
② 80%
(1)实验中应沿竖直方向 匀速 缓慢拉动弹簧测力计,小组同学发现实验过程中边拉动边读数,弹簧测力计示数不稳定,应该静止读数,你认为他的想法 不正确 (选填“正确”或“不正确”)。
(2)用丁图装置进行实验,得出表中第4次实验数据,请将表中的两个数据填写完整。
(3)通过比较 1、2 (填实验序号)两次实验数据得出结论:使用同一滑轮组提升同一重物时,滑轮组的机械效率与绳子段数无关。
(4)通过比较 2、3 (填实验序号)两次实验数据得出结论:同一滑轮组提升重物时,物重越大,滑轮组的机械效率越高。
(5)完成以上实验后,另一小组同学使用甲、乙两个装置(动滑轮自重一样)分别提升重力为G1和G2的两个物体,升高相同的高度。绳自由端施加竖直方向的拉力分别为F1和F2且F1=F2,拉力所做的功分别为W甲、W乙,两装置的机械效率分别为η甲和η乙,若不计绳重与摩擦,则W甲 < W乙,η甲 < η乙。(以上两空均选填:“>”、“<”或“=”)
【分析】(1)实验中应沿竖直方向匀速向上拉动弹簧测力计,使钩码上升,此时系统处于平衡状态,测力计示数等于拉力大小;
若静止读数,测力计没有测量出机械之间的摩擦,测量的拉力偏小;
(2)根据s=nh求出绳子自由端移动的距离;根据η=×100%=×100%求出第4次实验的机械效率;
(3)研究滑轮组的机械效率与绳子段数的关系,要控制提升物体的重力相同和使用同一滑轮组,而绳子段数不同;
(4)研究滑轮组的机械效率与物重的关系,要控制其它因素相同,只改变物重大小,据此分析。
(5)由图可知甲、乙两滑轮组绳子的有效股数,根据s=nh比较两物体提升相同高度时滑轮组绳端移动的距离关系,根据W=Fs可知F1、F2大小相等时拉力做功的关系;
根据F=(G+G动)可知F1、F2大小相等时G甲和G乙的关系,根据η=×100%=×100%=×100%,比较甲、乙两滑轮组的机械效率是否相等。
【解答】解:(1)实验中要竖直向上匀速拉动弹簧测力计,使物体匀速升高,此时系统处于平衡状态,测力计示数才等于拉力大小;
小组同学发现实验过程中边拉动边读数,弹簧测力计示数不稳定,应该静止读数,他的想法不正确,因为他没有考虑到绳子与轮之间的摩擦对测力计示数的影响,从而影响滑轮组的机械效率;
(2)由图丁知,绳子的有效段数n=4,
在第4次实验中,绳端移动的距离:s=4h=4×0.1m=0.4m;
第4次实验测得的机械效率为:η=×100%=×100%=×100%=80%;
(3)根据绳子自由端移动的距离与物体升高的高度的关系:s=nh,在实验1、2、3、4中,绳子的有效段数分别为2、3、3、4,即分别是用甲乙丙丁装置做的实验;
通过比较1、2两次实验数据可得出结论:使用同一滑轮组提升同一重物时,滑轮组的机械效率与绳子段数无关;
(4)通过比较2、3两次实验数据得出结论:同一滑轮组提升重物时,物重越大,滑轮组的机械效率越高;
(5)由图可知,n甲=2,n乙=3,由s=nh可知,两物体提升相同高度时,乙滑轮组绳端移动的距离较大,由W=Fs可知,若F1、F2大小相等,则拉力F2做的功较多,所以W甲<W乙;
不计绳重与摩擦由F=(G+G动)可知,当F1、F2大小相等时,G甲<G乙,由η=×100%=×100%=×100%可知,甲、乙两滑轮组的机械效率相同,所以η甲<η乙。
故答案为:(1)匀速;不正确; (2)0.4;80%;(3)1、2;(4)2、3;(5)<;<。
20.如图所示,是探究“杠杆的平衡条件”的实验装置。
(1)小华实验前发现杠杆右端低,要使它在水平位置平衡,应将杠杆右端的平衡螺母向 左 调节;
(2)如图甲所示,在杠杆左边A处挂3个相同得到钩码,要使杠杆在水平位置平衡,应在杠杆右边B处挂同样的钩码 4 个:
(3)在探究过程中,需要测量和记录动力、动力臂、阻力,阻力臂四个物理量,在进行多次实验的过程中,小华 可以 (选填“可以”或“不可以”)同时改变4个量进行探究测量;
(4)做实验时,当杠杆由图乙的位置变成图丙的位置时,拉力F的力臂 减小 ,弹簧测力计的示数将 不变 ;(以上两空选填“变大”、“变小”或者“不变”,设杠杆质地均匀,支点恰好在杠杆的中心,并且不计支点处摩擦)
(5)调节杠杆在水平位置平衡后,进行如图丁所示的实验,用量程为0~5N的弹簧测力计在A点竖直向上拉(如图丁M所示),杠杆在水平位置平衡时,弹测力计的示数为2.5N。若弹簧测力计斜向上拉(如图丁N所示)。杠杆在水平位置平衡时,弹簧测力计的示数 大于 2.5N(选填“大于”、“小于”或“等于”)。
(6)杆秤是我国古代对杠杆平衡条件的应用。小华用硬杆自制了一个杆秤,杆的粗细不均匀。将提纽固定在O点,提起提纽,托盘中不放重物,将秤砣移至O点左侧的B点,秤杆可以在水平位置平衡,如图戊所示。已知提纽与托盘间距离OA=10cm,OB=2cm,秤砣质量m=0.5kg。关于该杆秤,以下说法正确的是 CD 。
A.秤的零刻线在O点
B.因杆粗细不均匀,所以秤的刻线分布也不均匀
C.秤的2kg刻度线在O点右侧C处,OC=38cm
D.称量物体质量时,若杆秤右端上扬,可将秤砣向右侧适当移动
【分析】(1)若要使杠杆在水平位置平衡,应该将平衡螺母向杠杆上翘的一端移动;
(2)根据杠杆平衡条件分析计算;
(3)测量性实验为了减小误差或者寻找规律进行多次测量,如果物理量是个恒量,多次测量求平均值可以减小实验误差;如果不是测量具体的物理量,而是寻找规律也采取多次测量,寻找普遍性;
(4)力臂指的是支点到力的作用线的距离,杠杆平衡条件:动力×动力臂=阻力×阻力臂,根据杠杆平衡的条件可解决题目;
(5)利用杠杆平衡条件进行判断,阻力和阻力臂的乘积不变,动力臂变化,动力也变化。
要使杠杆在水平位置平衡,阻力和阻力臂的乘积不变,动力和动力臂的乘积应该也不变,最大的动力是5N,求出最小的动力臂,求出弹簧测力计和杠杆的夹角,求出拉力的方向与竖直方向的最大夹角;
(6)杆秤利用的是杠杆的平衡条件,通过力臂的大小关系得出物体重和秤砣重之间的关系,进而得出物体的质量与秤砣的质量之间的关系,测量的是物体的质量。
【解答】解:(1)杠杆的右端低,左边上翘,因此要想使杠杆在水平位置平衡,应将平衡螺母向左调节;
(2)设杠杆每个格的长度为L,每个钩码的重力为G,根据杠杆的平衡条件:FALA=FBLB,即3G×4L=FB×3L,解得FB=4G,需挂4个钩码;
(3)在“探究杠杆平衡条件”实验时本实验中,可以同时改变动力(臂)和阻力(臂),多次进行实验行多次测量的目的是:避免实验次数过少,导致实验结论具有偶然性,便于从中寻找规律;
(4)做实验时杠杆已达到平衡,当杠杆由图乙的位置变成图丙的位置时,拉力F的力臂减小,其动力臂、阻力臂的比值是不变的,所以在阻力不变的情况下,根据杠杆平衡条件F1L1=F2L2分析可知动力是不变的;
(5)弹簧测力计竖直向上拉动杠杆时,动力臂是OA,当斜向上拉动杠杆时,动力臂变为OC,阻力和阻力臂的乘积不变,动力臂变小,根据杠杆平衡条件,动力变大,所以弹簧测力计示数大于2.5N;
(6)A、将提纽固定在O点,提起提纽,托盘中不放重物,将秤砣移至O点左侧的B点,秤杆可以在水平位置平衡,因此B点应该为零刻度线,故A错误;
B、无论杆秤粗细是否均匀,秤的刻度线分布都是均匀的,因为无论杆秤粗细是否均匀,由杠杆平衡条件F1L1=F2L2可知,动力臂与阻力的大小成正比,故B错误;
C、由题意知B点为零刻度线,则OA=10cm,OB=2cm,
利用支点左端力与力臂乘积的变化量等于右端力与力臂乘积变化量:m1g×OA﹣m2×OB=m2g×OC,
即2kg×10N/kg×10cm﹣0.5kg×10N/kg×2cm=0.5kg×10N/kg×OC,
解得:OC=38cm,
故C正确;
D、秤杆右端上扬,即为左端重,应将秤砣向右移,增加力臂使其平衡,故D正确。
故选:CD。
故答案为:(1)左;(2)4;(3)可以;(4)不变;(5)大于;(6)CD。
专题11简单的机械和功(解析版)
一.实验探究题(共20小题)
1.在“探究杠杆的平衡条件”的实验中:
(1)在挂钩码前,杠杆左端高右端低,要使杠杆在水平位置平衡,应向 左 端调节平衡螺母;
(2)调平后在A处挂两个相同的钩码(每个钩码质量是50g),用弹簧测力计在C处竖直向上拉,使杠杆在图乙(水平)位置平衡时,测力计的示数为F1,在图丙位置平衡时,测力计的示数为F2,则F1= 2 N,F2 = F1(填“<”、“>”或“=”)。实验时,让杠杆在图乙位置平衡,目的是 为了便于测量力臂 。(g取10N/kg)
【分析】(1)调节杠杆平衡的原则是螺母的调节方向是向上翘的那端调节;
(2)知道动力臂、阻力、阻力臂,根据杠杆平衡条件F1L1=F2L2求出动力,即为测力计的示数;
力臂指的是支点到力的作用点的距离,杠杆平衡条件:动力×动力臂=阻力×阻力臂,根据杠杆平衡的条件可解决题目;
实验时要调节杠杆在水平位置平衡,使杠杆平衡的目的是便于测量力臂。
【解答】解:(1)杠杆重心右移应将平衡螺母向左调节,直至重心移到支点处;
(2)设杠杆一个小格代表L,根据杠杆平衡条件F1L1=F2L2知,
F1×2L=2×0.05kg×10N/kg×4L,解得F1=2N;
做实验时,如图丙所示的杠杆已达到平衡。当杠杆由图乙的位置变成图丙的位置时,其动力臂、阻力臂的比值是不变的,所以在阻力不变的情况下,动力是不变的,所以F2=F1;
实验时,施加的动力和阻力的方向都是竖直方向,此时力与力臂垂直,可从杠杆的标尺上直接读出对应的力臂,即这样操作是为了便于测量力臂。
故答案为:(1)左;(2)2;=;为了便于测量力臂。
2.图甲是某实验小组探究“杠杆的平衡条件”的实验装置。
(1)挂钩码前,杠杆在图甲所示的位置静止,接下来应将杠杆两端的螺母向左侧调节,使杠杆在水平位置平衡,为了 消除杠杆重力对平衡的影响且便于测量力臂 。
(2)在水平平衡的杠杆两边挂上钩码后如图乙所示,要使杠杆重新在水平位置平衡,应该选择下列方法中 B
A.向左调节平衡螺母
B.将左侧钩码向左移动
C.增加右侧钩码个数
(3)如图丙是一个加宽的杠杆装置,此时杠杆处于平衡状态。若只将左侧的钩码改挂到A点正上方的B点,此时杠杆 仍能 (选填“仍能”或“不能”)保持平衡。
(4)某同学提出,若支点不在杠杆的中点,杠杆的平衡条件是否仍然成立?于是该小组利用图丁所示的装置进行探究,在杠杆O点处挂上2个钩码(每个钩码重0.5N),用弹簧测力计在A点处竖直向上拉,使杠杆在水平位置平衡,此时弹簧测力计示数为 2.3 N。以弹簧测力计的拉力为动力F1,钩码处绳子拉力为阻力F2,多次改变动力作用点的位置进行实验发现:当杠杆水平平衡时,F1L1总是大于F2L2,其原因是 杠杆自重对杠杆平衡有影响 。
【分析】(1)挂钩码前,调节平衡螺母使杠杆在水平位置平衡,是为了消除杠杆重力对平衡的影响且便于测量力臂;
(2)根据杠杆的平衡条件分析;
(3)力臂是支点到力的作用线的距离,将左侧的钩码改挂到A点正上方的B点,力臂是线段OA,与原来相比较力和力臂都没有改变,所以杠杆仍能保持平衡;
(4)明确测力计分度值和单位;
若支点不在杠杆中心,此时杠杆的平衡会受杠杆自重的影响,根据杠杆平衡条件判断F1L1与F2L2大小。
【解答】解:(1)挂钩码前,调节平衡螺母使杠杆在水平位置平衡,是为了消除杠杆重力对平衡的影响且便于测量力臂;
(2)由图可知,杠杆不在水平位置,右端向下倾斜,左端上翘,则左侧力与力臂的乘积要小于右侧力与力臂的乘积;
A、在实验的过程中,不能通过调节平衡螺母使杠杆在水平位置平衡,故A错误;
B、将左侧钩码向左移动,左侧的力不变,力臂变大,则左侧力与力臂的乘积变大,会使杠杆平衡,故B正确;
C、增加右侧钩码个数,右侧的力臂不变,力变大,力与力臂的乘积变大,杠杆不会平衡,故C错误。
故选:B;
(3)力臂是支点到力的作用线的距离,将左侧的钩码改挂到A点正上方的B点,力的作用线没有变化,力臂是线段OA,与原来相比较力和力臂都没有改变,所以杠杆仍能保持平衡;
(4)分度值为0.1N,弹簧测力计示数为2.3N;
图丁中,设杠杆的重力为G,力臂为LG,当杠杆平衡时,根据杠杆的平衡条件:F1L1=F2L2+GLG,
由丁图可知LG≠0,所以杠杆自重对杠杆平衡有影响,此时F1L1>F2L2。
故答案为:(1)消除杠杆重力对平衡的影响且便于测量力臂;(2)B;(3)仍能;(4)2.3;杠杆自重对杠杆平衡有影响。
3.小明利用甲和丙的器材测量滑轮组的机械效率(忽略绳重和摩擦):
(1)当小明利用图甲装置进行实验时,重物以0.1m/s的速度匀速上升,则弹簧测力计竖直向上移动的速度为 0.3 m/s。
(2)只改变动滑轮重力,提升同一物体进行多次实验,获得数据并绘制出如图乙所示的图像,分析图像可知被提升物体所受的重力相同时,动滑轮越重,滑轮组的机械效率越 低 。
(3)分析图像中的A点可知,被提升物体所受的重力为 4 N。
(4)当甲、丙滑轮组使用相同的动滑轮提升相同的重物时,甲滑轮组的机械效率 等于 丙滑轮组的机械效率。(选填“大于”“等于”或“小于”)
【分析】(1)由图甲可知滑轮组绳子的有效股数,根据v绳=nv物求出弹簧测力计竖直向下移动的速度;
(2)根据图像得出机械效率与动滑轮重的关系,然后得出相应的结论;
(3)忽略绳重和摩擦,提升物体重力所做的功为有用功,提升物体和动滑轮重力所做的功为总功,根据η=×100%表示出滑轮组的机械效率,然后结合A点的数据求出被提升物体的重力;
(4)若忽略绳重及摩擦,则克服动滑轮重做的功为额外功的唯一来源,他们做的有用功相同,因此总功相同,由η=×100%分析。
【解答】解;(1)由图可知,n=3,则弹簧测力计竖直向上移动的速度v绳=nv物=3×0.1m/s=0.3m/s;
(2)根据图乙可知,被提升物体所受的重力相同时,动滑轮越重,滑轮组的机械效率越低;
(3)忽略绳重和摩擦,提升物体重力所做的功为有用功,提升物体和动滑轮重力所做的功为总功,
所以,滑轮组的机械效率η===,
由图乙可知,G动=1N,η=80%,则80%=,
解得:G=4N;
(4)小红同学分别使用动滑轮重相同的甲、丙滑轮组提升相同的重物时,若忽略绳重及摩擦,则克服动滑轮重做的功为额外功,额外功相同,做的有用功相同,因此总功相同,由η=×100%,则甲、丙滑轮组的机械效率相同,甲滑轮组的机械效率等于丙滑轮组的机械效率。
故答案为:(1)0.3;(2)低;(3)4;(4)等于。
4.探究“杠杆的平衡条件”实验。
(1)实验前,将杠杆置于支架上,当杠杆静止时,发现左端下沉,如图甲所示,此时应把杠杆的 平衡螺母 向右调节,直至杠杆在 水平 (选填“任意”或“水平”)位置平衡;
(2)调节平衡后,在杠杆上A点处挂两个钩码,如图乙所示,则在B点处应挂 3 个钩码,才能使杠杆在原位置平衡。在A、B两点各增加3个钩码,则杠杆 左 (选填“左”或“右”)端下沉;
(3)实验时,不再调节平衡螺母,使杠杆的重心位置保持在O点不变,将支点换到O'点,如图丙所示,发现A点处只挂1个钩码,杠杆仍然保持平衡。若每个钩码重为1N,则杠杆重力为 0.5 N。由此可知,将杠杆支点位置设在 O (选填“O”或“O'”)点进行实验,能避免杠杆自身重力影响实验结论动力×动力臂=阻力×阻力臂的得出;
(4)为了使实验结论具有 普遍性 (选填“普遍性”或“偶然性”),应改变钩码个数及悬挂位置,多次进行实验;图乙中保持A处的钩码不变,将B处的弹簧测力计改换在C处竖直向上拉,使杠杆在水平位置平衡。如图所示,当弹簧测力计从原位置逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将 变大 (选填“变大”“变小”或“不变”)。
【分析】(1)当杠杆静止时,发现左端下沉,应把杠杆的平衡螺母向相反方向调节,直至杠杆在水平位置平衡;
(2)根据杠杆平衡条件做出解答;
(3)根据杠杆平衡条件得出杠杆的重力;
将杠杆的中心位置挂在支架上,可避免杠杆自重的影响;
(4)实验中为得出杠杆平衡条件的普遍规律,需多测几组数据进行分析;
分析操作中引起力臂的变化,根据杠杆平衡条件分析解题。
【解答】解:(1)当杠杆静止时,发现左端下沉,如图甲所示,此时,应把杠杆的平衡螺母向右调节,直至杠杆在水平位置平衡;
(2)设一个钩码重为G,一格为L,根据杠杆平衡条件可知:2G×3L=nG×2L,所以n=3,需在B点挂3个钩码;
在A、B两点各增加3个钩码,左侧变为5G×3L=15GL,右侧变为6G×2L=12GL,故杠杆不能平衡,向左端下沉;
(3)设杠杆的重力为G,每一格的长度为L.则每一格的重力为,支点O′左侧的部分的杠杆重=,力臂为L,右侧部分重=,力臂为3L,
根据杠杆平衡条件可知:1N×L+×L=×3L,解出G=0.5N,
将杠杆的中心位置挂在支架上,可避免杠杆自重的影响,故将杠杆支点位置设在O点进行实验
(4)多次改变力和力臂的大小,得到了多组实验数据,得出了杠杆平衡条件。该实验测多组数据的目的是为了得出的结论更具有普遍性;
当弹簧测力计在原位置逐渐向右倾斜时,F1的力臂减小,F2L2乘积不变,要使杠杆仍然在水平位置平衡,弹簧测力计的拉力将增大,即弹簧测力计的示数将变大。
故答案为:(1)平衡螺母;水平;(2)3;左;(4)普遍性;变大。
5.小张和小刘在做“探究杠杆平衡条件”实验中:
(1)实验前,把杠杆中心支在支架上,杠杆静止在图甲所示位置,小张将右端的平衡螺母向右调,小刘认为也可以将左端的平衡螺母向 右 调(选填“左”或“右”),使杠杆在水平位置平衡;
(2)实验中,他们多次在杠杆两端加挂钩码,并调节钩码位置,使杠杆保持水平平衡,记录多组数据,这样做的目的是 B ;
A.取平均值,减小误差
B.避免偶然性,寻找普遍规律
(3)如图乙所示,始终保持杠杆在水平位置平衡,小张将弹簧测力计从②位置缓慢移动到①位置时,测力计的示数将 变小 (选填“变大”、“变小”或“不变”)。若每个钩码的重力为0.3N,当弹簧测力计在位置①时的读数为 2 N。
【分析】(1)杠杆处于静止状态或匀速转动状态时,杠杆处于平衡状态;调节杠杆在水平位置平衡,平衡螺母向上翘的一端移动。
(2)只用一组数据得到结论,偶然性太大,因此应获取多组实验数据找普遍规律从而得出杠杆平衡条件。
(3)当弹簧测力计斜着拉时,其力臂变小,根据杠杆平衡条件分析出答案。根据杠杆平衡条件F1L1=F2L2可求测力计的示数。
【解答】解:(1)如图甲,杠杆左端下沉,杠杆的右端上翘,应将杠杆重心向右移,所以应将两端的平衡螺母(左端和右端的均可)向右调节,使杠杆在水平位置平衡;
(2)探究杠杆平衡的条件时,多次改变力和力臂的大小主要是为了获取多组实验数据归纳出物理规律,使结论具有普遍性,故B正确;
(3)将弹簧测力计从②位置缓慢移动到①位置时,阻力和阻力臂不变,拉力F力臂变大,由杠杆平衡条件可知,测力计的示数将变小;
设每个小格的长度为L,每个钩码的重力为G,测力计在位置①时,根据杠杆平衡的条件有:
4G×5L=F×3L,
解得拉力:
F===2N,
即弹簧测力计在位置①时的读数为2N。
故答案为:(1)右;(2)B;(3)变小;2。
6.如图所示,在“探究滑轮组的机械效率”时,小明用一个动滑轮和一个定滑轮组成的滑轮组实验,实验中测得数据真实可靠,见下表:
(1)请根据表中数据,在图中画出实验中滑轮组的绕绳方法。
(2)表格中编号①处数据应填 66.7 ,此次实验做的总功是 0.6 J。
(3)由表中第1、2组数据可知,同一滑轮组的机械效率与 物体被提升的高度 无关。
(4)分析表中第1、3、4组数据,你得出的本实验结论是:同一滑轮组匀速提升重物时,机械效率随 被提升的物重 的增加而增大。
实验次数
物重G/N
钩码上升高度
h/m
动力F/N
动力作用点移动
距离s/m
滑轮组的机械
效率η/%
I
1
0.1
0.7
0.3
47.6
2
1
0.2
0.7
0.6
47.6
3
2
0.1
Ll
0.3
60.6
4
4
0.1
2
0.3
①
【分析】(1)根据h与s的关系(s=nh)结合表格中数据判断承担物重的绳子段数,然后绕线;
(2)根据公式η=×100%=×100%计算第四次的机械效率,根据W总=Fs可求总功;
(3)分析机械效率的变化及前面物理量的变化得出结论,机械效率与物体被提升的高度无关;
(4)分析3、4中机械效率和物理量的变化,得出机械效率与被提升的物重之间的关系。
【解答】解:
(1)由实验数据可知,s=3h,所以滑轮组由3段绳子承担物重,因此绳子应从动滑轮上面的挂钩开始绕起,如图所示:
;
(2)第4次实验的机械效率:η=×100%=×100%=×100%≈66.7%;
此次实验做的总功是:
W总=Fs=2N×0.3m=0.6J;
(3)由第1、2组数据可知,动滑轮重、钩码重均相同,钩码被提升的高度不同,但机械效率相同,可知同一滑轮组的机械效率与物体被提升的高度无关;
(4)由第1、3、4组数据可知,动滑轮重、钩码被提升的高度相同,被提升的钩码重不同,机械效率不同,物重越大,机械效率越大,故结论为:同一滑轮组匀速提升重物时,机械效率随被提升的物的增加而增大。
故答案为:(1)见上图;(2)66.7;0.6;(3)物体被提升的高度;(4)被提升的物重。
7.物理实验小组的同学利用图中的装置探究杠杆平衡的条件,每个钩码的质量相等,杠杆上的刻度均匀。
(1)实验前,如图甲所示,此时的杠杆 是 (选填“是”或“不是”)处于平衡状态。实验中使杠杆在水平位置平衡,这样做的好处是便于直接测量 力臂 。
(2)他们完成一次操作后,实验现象如图乙所示,记录的数据为动力F1=1.5N,动力臂l1=0.1m,阻力F2=1N,则阻力臂l2=0.15m。于是甲同学就得出了“动力×动力臂=阻力×阻力臂”的结论,乙同学认为他的结论不一定科学,理由是 一组实验数据太少,具有偶然性,不能作为普遍规律 。
(3)他们继续进行实验,在杠杆平衡后,他们在图丙所示的A位置挂上3个钩码,为了使杠杆仍在水平位置平衡,这时应在B位置挂上 4 个相同的钩码。
(4)如图丁,用弹簧测力计代替右侧钩码,沿与水平方向成30°角斜向下拉杠杆,保持杠杆在水平位置平衡。若把左侧钩码的拉力作为阻力,右侧弹簧测力计的拉力作为动力,此时的杠杆是 费力 杠杆(选填“省力”“费力”或“等臂”),请在乙图中画出此时拉力F的力臂l。
【分析】(1)杠杆静止或匀速转动时都属于平衡状态。
探究杠杆平衡条件时,使杠杆在水平位置平衡,这样方便测量力臂,支点在杠杆的中点是为了消除杠杆的自重;
(2)探究杠杆平衡条件时,一般要进行多次测量,为了使实验结论具有普遍性,只有一次实验得出的结论是不科学的;
(3)根据杠杆的平衡条件:F1L1=F2L2可求出钩码的个数;
(4)动力臂大于阻力臂是省力杠杆;过支点向力的作用线作垂线,画出此时拉力F的力臂L。
【解答】解:(1)杠杆静止或匀速转动时都属于平衡状态,如图杠杆是静止状态,此时杠杆是平衡状态;
实验中使杠杆在水平位置平衡,这样做的好处是便于测量力臂;
(2)只有一次实验得出杠杆平衡的条件是:动力×动力臂=阻力×阻力臂,这种结论很具有偶然性,不合理,要进行多次实验,总结杠杆平衡条件;
(3)设一格为L,一个钩码重G,则有3G×4L=nG×3L,解得n=4,故应在B处挂6个钩码;
(4)如图乙,用弹簧测力计代替右侧钩码,沿与水平方向成30°角斜向下拉杠杆,保持杠杆在水平位置平衡。若把左侧钩码的拉力作为阻力,右侧弹簧测力计的拉力作为动力,画出此时拉力F的力臂L,每个小格长L0,如下图:
L=×3L0=1.5L0<2L0,动力臂小于阻力臂是费力杠杆。
故答案为:(1)是;力臂;(2)一组实验数据太少,具有偶然性,不能作为普遍规律;(3)4;(4)费力;图见解答;
8.在探究“杠杆的平衡条件”实验中,所用的实验器材如图所示。
(1)小明先把杠杆的中点挂在支架上,杠杆静止在图甲所示的位置时,为了把杠杆调水平,应将左端的平衡
螺母向 右 调。
(2)调节杠杆两端的平衡螺母,使杠杆恰好在水平位置平衡,目的是 消除杠杆自重的影响 。
(3)做三次实验的目的是 寻找杠杆平衡的普遍规律 。三次实验中,当杠杆在水平位置平衡后,所挂钩码如图乙所示,分析可以得出实验结论是 F1L1=F2L2 。
(4)同学们交流后,发现本实验中杠杆的支点始终在中间,从而提出,如果杠杆的支点在一端是否也能得出同样的结论呢?要想解决此问题,需要增加一个器材是 弹簧测力计 。
【分析】(1)杠杆倾斜时,杠杆的重心偏向杠杆下沉的一端,左、右两端的螺母(或一端的螺母)要向杠杆上翘的一端调节;
(2)调节好以后,仍要使杠杆平衡,是为了便于测量力臂的长度;
(3)初中物理用实验探究物理问题时要进行多次实验,有的是为了多次测量求平均值来减小误差;有的是多次测量发现变化规律;有的是为了使实验结论具有普遍性;杠杆的平衡条件:F1L1=F2L2;
(4)如果杠杆的支点在一端,那么需要弹簧测力计向上的拉力。
【解答】解:(1)杠杆的右端上翘,左端的平衡螺母或右端的平衡螺母都向上翘的右端移动,才能使杠杆在水平位置平衡;
(2)杠杆在水平位置平衡,这样做是为了消除杠杆自重的影响;
(3)改变支点两侧的钩码位置和个数,一般要做三次实验,得到三组数据并进行分析,得出的实验结论具有普遍性,避免偶然性;
杠杆平衡满足的条件是:F1L1=F2L2;
(4)本实验中杠杆的支点始终在中间,如果杠杆的支点在一端得出同样的结论,需要增加一个器材是弹簧测力计,向上的拉力。
故答案为:(1)右;(2)消除杠杆自重的影响;(3)寻找杠杆平衡的普遍规律;F1L1=F2L2;(4)弹簧测力计。
9.某实验小组在做“探究杠杆的平衡条件”实验。
(1)实验前,某同学将杠杆置于支架上,当杠杆静止时,发现杠杆左端下沉,如图甲所示,为了在实验过程中方便测量力臂,接下来应将平衡螺母向 右 移动,直至杠杆在水平位置平衡;
(2)调节杠杆水平平衡后,在杠杆A点处挂3个钩码,如图乙所示,则在B点处挂 4 个钩码,才能使杠杆在水平位置平衡。若将两端同时减少一个钩码,杠杆会 顺时针 (选填“顺时针”或“逆时针”)旋转;
(3)如图丙,将弹簧测力计从第一种位置改变到第二种位置,测力计的示数将 变大 (选填“变大”“变小”或“不变”);
(4)某同学在实验过程中发现当杠杆处于如图丁所示的状态时,杠杆也能保持水平平衡,此时杠杆属于 费力 (选填“省力”或“费力”)杠杆,请举出它在生活生产中的一个应用实例 钓鱼竿 。
【分析】(1)当杠杆静止时,发现左端下沉,应把杠杆的平衡螺母向相反方向调节,直至杠杆在水平位置平衡;
(2)根据杠杆平衡条件做出解答;
(3)根据操作中引起力臂的变化,根据杠杆平衡条件分析解题;
(4)动力臂小于阻力臂为费力杠杆。
【解答】解:(1)当杠杆静止时,发现左端下沉,如图1所示,此时,应把杠杆的平衡螺母向右调节,直至杠杆在水平位置平衡;
(2)设一个钩码重力为G,杠杆每一格的长度为L,在B点处应挂n个钩码,
根据杠杆平衡条件可知:3G×4L=nG×3L,所以n=4,需在B点挂4个钩码;
将图乙中的杠杆两端同时减去一个钩码,
杠杆的左端:2G×4L=8GL,
杠杆的右端:3G×3L=9GL,
所以杠杆的右端下沉,杠杆会顺时针旋转;
(3)弹簧测力计在B处竖直向下拉时,拉力的方向竖直向下与杠杆垂直,动力臂等于支点到力的作用点的距离;弹簧测力计在逐渐旋转过程中,拉力的方向不再与杠杆垂直,动力臂变小,阻力和阻力臂不变,根据杠杆平衡条件得,动力变大,则弹簧测力计的示数变大;
(4)由图丁可知此时L1<L2,故为费力杠杆,生活中常见的镊子、钓鱼竿等都是费力杠杆。
故答案为:(1)右;(2)4;顺时针;(3)变大;(4)费力;钓鱼竿(或镊子等)。
10.如图所示是小红同学探究影响斜面机械效率因素的实验装置,物体在沿斜面向上的拉力F作用下匀速向上运动。实验准备的器材有:三个质量不同的木块A、三个高度不同的长方体铁块C、刻度尺、弹簧测力计。
实验序号
重物G/N
弹簧测力计示数F/N
重物沿斜面移动得距离L/m
重物上升得高度h/m
机械效率η/%
1
2.0
1.51
0.80
0.40
66.2
2
2.5
1.89
0.80
0.40
66.1
3
3.0
2.26
0.80
0.40
66.4
(1)上面的表格是小红探究斜面机械效率与物重的关系时记录的有关数据,通过分析数据,你可以得出结论是 斜面的机械效率与物重无关 ;
(2)上述实验中,保持斜面长度不变,将斜面高度改为0.2m,把一个重3N木块沿斜面匀速向上拉时,所需拉力为1.5N,则此过程中拉力所做的功为 1.2 J,物体受到的摩擦力为 0.75 N,此过程中木块的机械能 变大 (选填“变大”、“变小”或“不变”),斜面的机械效率为 50 %,由此可知斜面的机械效率与斜面的倾斜程度 有关 (选填“有关”或“无关”);
(3)选择合适的木块A及铁块C后,斜面机械效率变为70%,此时匀速向上拉动A时,需要的拉力4N,则此时选择的物体A重力为 3 N。
【分析】(1)分析表中数据知:斜面粗糙程度、斜面高、斜面长不变,改变物重,机械效率不变;
(2)克服重力做的功为有用功W有,拉力做的功为总功W总,则W额=W总﹣W有;根据W额=fs求出摩擦力的大小;根据η=×100%求出斜面的机械效率;机械能等于动能和势能的总和,动能的大小与质量、速度有关,重力势能的大小与质量和高度有关;
(3)根据机械效率公式写出表达时,根据机械效率小于1求出重力的取值范围。
【解答】解:(1)根据表格中的数据可知,机械效率的数值不同,但差别极其微小,由于实验中存在误差,所以我们认为机械效率是相同的;由数据可知,斜面的倾斜程度和斜面的粗糙程度均相同,在改变物重时,机械效率不变,说明斜面的机械效率与物重无关;
(2)保持斜面长度不变,将斜面高度改为0.2m,把一个重3N物体沿斜面匀速向上拉时,所需拉力为1.5N,则所做的有用功为:W有=Gh=3N×0.2m=0.6J;
拉力做的总功为:W总=Fs=1.5N×0.8m=1.2J;
额外功为:W额=W总﹣W有=1.2J﹣0.6J=0.6J;
拉动物体上升的过程中,克服斜面的摩擦力所做的功为额外功,即W额=fs;此时物体受到的摩擦力为:f===0.75N;
匀速拉动物体上升的过程中,速度不变,动能不变,高度增大,重力势能变大,所以物体的机械能变大;
斜面的机械效率:η=×100%=×100%=50%;
保持斜面长度不变,将斜面高度改为0.2m,斜面的高度变小,斜面的机械效率变小,可以得到斜面的机械效率与斜面的倾斜程度有关;
(3)斜面的机械效率:η'====70%可知:==<1,所以物体重力范围为:G>2.8N;由表格数据可知物体重力为G=3N。
故答案为:(1)斜面的机械效率与物重无关;(2)1.2;0.75;变大;50;有关;(3)3。
11.如图所示是小明和小华探究“杠杆的平衡条件”的实验装置。
(1)实验前,将杠杆置于支架上,当杠杆静止时,如图甲所示,此时可以把右端的平衡螺母向 右 (选填“左”或“右”)调节,直至使杠杆在水平位置平衡;在后面的实验过程中 不能 (选填“能”或“不能”)再进行上述操作。
(2)如图乙,小明在实验时分别沿着竖直向下和斜向下两个方向拉弹簧测力计,都能使杠杆在水平位置平衡。同组的小华认为,竖直向下拉动测力计操作更方便,原因是 动力力臂可在杠杆上直接读出更加方便 。
(3)实验中,通过改变钩码和弹簧测力计的位置或钩码的个数来改变力臂或力的大小进行多次实验,目的是: 寻找普遍规律 。
(4)如图丙,调节好杠杆后在杠杆左边距离支点第3格处挂了4个钩码,每个钩码的重力均为0.5N,要使杠杆平衡,可以在支点右侧第4格A处挂个相同的钩码,或在左侧第2格B处竖直向拉动弹簧测力计,此时测力计的示数是 3 N。(杠杆上每小格等距)
(5)他们继续探究:保持钩码数量和位置不变,杠杆在水平位置平衡时,测出多组动力臂L1和动力F1的数据,绘制了L1﹣F1的关系图像,如图丁所示。请根据图像推算,当L1为25cm时,F1为 0.6 N。
【分析】(1)杠杆平衡调节原则是:右低将平衡螺母左调,左低将平衡螺母右调;
调节杠杆平衡后,在接下来的实验过程中不能再通过调节平衡螺母使杠杆在水平位置平衡;
(2)当拉力F向右倾斜时,分析出力臂的变化结合杠杆的平衡条件判断力的变化;
(3)通过实验总结实验结论时,一般要进行多次实验,如果只用一组数据得到结论,偶然性太大,因此应获取多组实验数据归纳出普遍的物理规律;
(4)根据杠杆的平衡条件:F 1L1=F2L2进行解答;
(5)由于保持A点钩码数量和力臂不变,根据F1L1=F2L2,可知F2L2为一定值,由图丙知求出这个不变的值求了当L1为25cm时F1大小。
【解答】解:(1)发现杠杆左端下沉,应把杠杆的平衡螺母向右调节,直至杠杆在水平位置平衡;
调节杠杆平衡后,在接下来的实验过程中不能再通过调节平衡螺母使杠杆在水平位置平衡;
(2)竖直向下拉动测力计操作更方便,原因是动力力臂可在杠杆上直接读出更加方便;
(3)通过实验总结归纳出物理规律时,一般要进行多次实验,获取多组实验数据归纳出物理规律才具有普遍性,结论才正确,所以在探究杠杆平衡的条件时,多次改变力和力臂的大小主要是为了获取多组实验数据归纳出物理规律;
(4)若杠杆上每个小格长度是L,根据杠杆的平衡条件有:4×0.5N×3L=F×2L,解得F=3N,
所以此时测力计的示数是3N;
(5)由于保持A点钩码数量和力臂不变,即阻力和阻力臂大小不变,根据F1L1=F2L2,可知F2L2为一定值,
由图丁知:F1L1=1N×0.15m=3N×0.05m=0.15N•m,
则当L1为25cm时,
拉力F1==0.6N。
故答案为:(1)右;不能;(2)动力力臂可在杠杆上直接读出更加方便;(3)寻找普遍规律;(4)3N;(5)0.6N。
12.利用如图的实验装置探究“杠杆的平衡条件”。
(1)将该装置置于水平桌面上,静止时如图甲所示,此时杠杆处于 平衡 (平衡/非平衡)状态,为完成实验,应将杠杆的左边的平衡螺母向 右 调,右边的平衡螺母应向 右 调。
(2)如图乙所示,杠杆在水平位置平衡,记录数据。根据这一次实验数据,小明立即分析得出杠杆的平衡条件,他这种做法的不足是 实验次数太少,得出的结论具有偶然性 。经老师提醒后,小明继续进行实验,如图乙,若将A、B两点下方挂的钩码同时朝靠近支点O方向移动一小格,则杠杆 右端下沉 (选填“仍保持平衡”、“左端下沉”或“右端下沉”)。
(3)如图丙所示,若不在B点挂钩码,可改用弹簧测力计在B点向下拉杠杆,当测力计从a位置转动到b位置时,使杠杆仍在水平位置平衡,其示数大小将 变大 。
(4)杆秤是我国古代对杠杆平衡条件的应用.小华用硬杆自制了一个杆秤,杆的粗细不均匀,将提纽固定在O点,提起提纽,托盘中不放重物,将秤砣移至O点左侧的B点,秤杆可以在水平位置平衡,如图丁所示。已知提纽与托盘间距离OA=10cm,OB=2cm,秤砣质量m=0.5kg。关于该杆秤,以下说法正确的是 C 。
A.秤的零刻线在O点
B.因杆粗细不均匀,所以秤的刻线分布也不均匀
C.秤的2kg刻度线在O点右侧C处,OC=38cm
D.称量物体质量时,若杆秤右端上扬,可将秤砣向左侧适当移动
【分析】(1)杠杆静止时或杠杆匀速转动时,杠杆处于平衡状态;在调节杠杆平衡时,将平衡螺母向较高的一端调节;
(2)经过一次实验得出的实验结论可能具有偶然性,要进行多次实验,使实验结论具有普遍性;
根据杠杆的平衡条件计算即可;
(3)当拉力F向右倾斜时,保持B点不动,弹簧测力计的方向向右倾斜,这时杠杆右侧的力臂变短,根据杠杆的平衡条件可知,使杠杆仍在水平位置平衡,则弹簧测力计的示数将变大;
(4)杆秤利用的是杠杆的平衡条件,通过力臂的大小关系得出物体重和秤砣重之间的关系,进而得出物体的质量与秤砣的质量之间的关系,测量的是物体的质量。
【解答】解:(1)杠杆平衡状态是指杠杆静止状态或杠杆匀速转动状态,图中杠杆处于静止状态,因而该杠杆处于平衡状态;
杠杆不在水平位置平衡,左端向下倾斜,则重心应向右移动,故应向右调节左端或右端的平衡螺母;
(2)根据图乙这一组数据不能得出杠杆平衡的条件的结论,因为实验次数太少,只有一组数据,实验具有偶然性;
设杠杆一格的长度为L,每个钩码重为G,乙图中杠杆恰好处于平衡状态,若悬挂钩码的挂点A和B分别同时向支点O移近一格,
则有:3G×L<2G×2L,故杠杆将会右端下沉;
(3)保持B点不变,若拉力F从a到b倾斜时,此时F的力臂变短,根据杠杆的平衡条件,弹簧测力计示数大小将变大;
(4)A、将提纽固定在O点,提起提纽,托盘中不放重物,将秤砣移至O点左侧的B点,秤杆可以在水平位置平衡,因此B点应该为零刻度线,故A错误;
B、无论杆秤粗细是否均匀,秤的刻度线分布都是均匀的,因为无论杆秤粗细是否均匀,由杠杆平衡条件F1L1=F2L2可知,动力臂与阻力的大小成正比,故B错误;
C、由题意知B点为零刻度线,则OA=10cm,OB=2cm,
利用支点左端力与力臂乘积的变化量等于右端力与力臂乘积变化量:m1g×OA﹣m2×OB=m2g×OC,
即2kg×10N/kg×10cm﹣0.5kg×10N/kg×2cm=0.5kg×10N/kg×OC,
解得:OC=38cm,故C正确;
D、秤杆右端上扬,即为左端重,应将秤砣向右移,增加力臂使其平衡,故D错误。
故选:C。
故答案为:(1)平衡;右;右;(2)实验次数太少,得出的结论具有偶然性;右端下沉;(3)变大;(4)C。
13.某同学看到建筑工地上矗立的塔吊,是用电动机来带动滑轮组提升重物的设备。如何可以提高滑轮组的机械效率呢?为此该同学们用如图所示的装置进行了实验探究,实验数据记录如表所示。
实验次数
钩码重力/N
钩码上升高度h/m
绳端拉力F/N
绳端移动距离s/m
机械效率η(%)
1
1
0.1
0.6
0.3
55.6
2
1
0.2
0.6
0.6
55.6
3
2
0.1
1
0.3
66.7
4
2
0.1
0.7
0.5
57.1
(1)实验中,应沿 竖直 方向 匀速 拉动弹簧测力计。
(2)分析表中数据可知:第4次实验是用图 丙 所示装置来完成的。
(3)(多选)根据以上结论,你认为下列措施可提高机械效率的是 AC 。
A.减轻动滑轮重
B.减少绳端移动的距离
C.适当增加所提物体重
D.适当增加重物上升高度
(4)实验表明:额外功越小,总功越接近有用功。进一步推理得出:假设没有额外功,总功等于有用功,可见使用任何机械都不省功。下列物理规律的得出运用了这种研究方法的是 B 。
A.平面镜成像的规律
B.牛顿第一定律
C.阿基米德原理
【分析】(1)实验时应沿竖直方向匀速拉动物体;
(2)由s=nh确定n的大小,据此判断第4次实验是用哪个图所示装置来完成的;
(3)根据影响滑轮组效率高低的因素分析答题;
(4)物理学中,常常有难以达到条件的时候,这时,我们常常需要借助将实验想象为理想情况下来达到我们的目的,在实验基础上经过概括、抽象、推理得出规律,这种研究问题的方法就叫科学推理法。
【解答】解:(1)为了准确测出滑轮组的机械效率,应使弹簧测力计沿竖直方向做匀速直线运动;
(2)在第四次实验中,s=0.5m,h=0.1m,由s=nh可得n=5,即承担物重的绳子股数n=5,所以第4次实验是用丙图所示装置来完成的;
(3)要提高滑轮组的机械效率,可以:
A、减轻动滑轮重力,在提升相同重物、提升相同高度时,减小额外功,而有用功不变,总功减小,有用功与总功的比值增大,提高了滑轮组的机械效率;故A正确;
B、滑轮组的机械效率η====,可见滑轮组的机械效率与绳端移动的距离无关,所以,减少绳端移动的距离,不能提高滑轮组的机械效率;故B错误;
C、适当增加所提物体重,可以增大有用功,而额外功不变,有用功与总功的比值增大,可以提高滑轮组的机械效率,故C正确;
D、滑轮组的机械效率η====,可见滑轮组的机械效率与提升物体的高度无关,所以,增加重物上升高度,不能提高滑轮组的机械效率;故D错误;
故选AC;
(4)实验表明:额外功越小,总功越接近有用功:进一步推理得出:假设没有额外功,总功等于有用功;可见使用任何机械不省功(采用了理想化推理法):
AC、平面镜成像的规律、阿基米德原理可通过实验直接验证;
B、而牛顿第一定律不能用实验直接验证,是在实验的基础下推理得出的;
故选B。
故答案为:(1)竖直;匀速;(2)丙;(3)AC;(4)B。
14.“探究杠杆平衡条件”的实验中,把杠杆的中点支在支架上,杠杆停在如图甲所示的位置,
(1)为了使杠杆在水平位置平衡,可以调节右端的平衡螺母,使它向 左 (填“左”或“右”)移动。
(2)调节好的杠杆,如图乙,用弹簧测力向上拉动杠杆使其水平平衡,若每个钩码重为2N,则弹簧测力计的读数为 2.4 N
(3)如图丙,当弹簧测力计由M位置倾斜至N位置时,用力使杠杆在水平位置处于平衡,弹簧测力计的示数将会变 大 ,这是因为 动力臂变小了 。
(4)实验中测得的数据如表所示
测量序号
动力F1/N
动力臂l1/cm
阻力F2/N
阻力臂l2/cm
①
1
20
2
10
②
2
15
1.5
20
③
3
5
1
15
有的同学按现有方案得出如下结论“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离。”这个结论与杠杆平衡条件不符,原因是实验过程中 B 。
A.没有改变力的大小
B.没有改变力的方向
C.没有改变力的作用点
D.没有改变平衡螺母的位置从而让杠杆在水平位置重新平衡。
【分析】(1)杠杆处于静止状态和匀速转动状态都称为杠杆平衡。为了使杠杆在水平位置平衡,平衡螺母向上翘的一端移动;
(2)根据动力×动力臂=阻力×阻力臂,可求得弹簧测力计的读数;
(3)根据动力×动力臂=阻力×阻力臂,阻力和阻力臂不变,动力臂变短,动力变大;
(4)从支点到动力作用线的垂直距离叫动力臂;从支点到阻力作用线的垂直距离叫阻力臂。
【解答】解:
(1)杠杆停在如图甲所示的位置,左端上翘,要使杠杆在水平位置处于平衡状态,平衡螺母向上翘的左端移动;
(2)根据动力×动力臂=阻力×阻力臂,可得3×2N×2L=F×5L,解得:F=2.4N。
(3)弹簧测力计在M位置时,力臂是红色的线段;弹簧测力计在N位置时,力臂是绿色的线段。根据动力×动力臂=阻力×阻力臂,阻力和阻力臂都不变,动力臂变短,动力变大,故弹簧测力计示数变大。
(4)“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,是在杠杆在水平位置平衡且动力和阻力的方向都是竖直向下的条件下得出的,也就是实验过程中没有改变动力或阻力的方向。故选项A、C、D错误,选项B正确。
故答案为:(1)左;(2)2.4;(3)大;动力臂变小了;(4)B。
15.在探究“杠杆的平衡条件”实验中,小华利用杠杆、细线、钩码等器材进行探究:
(1)在挂钩码前,调节杠杆在水平位置平衡,从实验的角度来讲,杠杆在这个位置平衡是为了方便读取 力臂 。
(2)如图甲所示,在杠杆左侧的A点挂上两个钩码,为了使杠杆保持平衡,在杠杆的右侧挂钩码时,是先确定细线位置再挂钩码还是先挂钩码再确定细线的位置? 先挂钩码再确定细线位置 。理由是 可以使力臂连续改变,便于调节杠杆在水平位置平衡 。
(3)杠杆在如图甲所示的位置平衡。小华多次在左右两侧各加挂等量钩码,并保持细线位置不变,发现杠杆每次都能平衡。通过记录上述实验数据,得出杠杆的平衡条件是:“只有支点左右两侧的力臂相等和力的大小也相等时,杠杆才能平衡”。同组的小强同学分析这一过程,指出小华得出的结论不可信!理由是 没有在力臂不相等或作用力不相等的情况下进行多次试验 。
(4)小强帮小华改进实验方法后,正确得出了杠杆的平衡条件。接着他们想测量一把均匀木尺的质量,器材有:木尺、支座、带细线的质量为M的钩码。请你根据图示完成下列实验。
①如图乙示,将木尺平放在支座上,左右移动木尺,使木尺在水平位置平衡,记下使木尺平衡的这个支点位置,这个位置就是木尺的 重心 ,记为O。
②如图丙示,将质量为M的钩码挂在木尺左边某一位置,移动木尺,直到木尺能够在支座上重新保持水平平衡,记录钩码悬挂点到支座的距离L1和O点到支座的距离L2;
③根据杠杆平衡的条件,可以计算出木尺的质量m= 。
【分析】(1)挂钩码前,调节杠杆在水平位置平衡,作用力的方向与杠杆垂直,则作用力的力臂在杠杆上,便于读取力臂的大小;
(2)如甲图所示,在左端A点挂钩码,为使杠杆平衡并能连续改变力臂大小,使杠杆再次平衡,则应先挂钩码再移动作用线的位置确定细线位置;
(3)为得出普遍的实验结论,应改变作用力的大小或改变力臂的大小,进行多次实验;
(4)①如图乙所示,木尺在支座上水平平衡,则支点的位置即为木尺的重心;③根据杠杆平衡条件,计算木尺的质量。
【解答】解:(1)挂钩码前,调节杠杆在水平位置平衡,即作用力的方向与杠杆垂直,则作用力的力臂在杠杆上,杠杆在这个位置平衡是为了方便读取力臂;
(2)如图甲所示,在杠杆A点挂两个钩码,为使杠杆平衡,在右端挂钩码时,为使连续改变力臂的大小,可先挂钩码再确定细线的位置;
(3)小华的实验结论不可信。其理由是小华在力臂或作用力相等的情况下实验,实验结论不具有普遍性,应在力臂不等或作用力不相等的情况下进行实验;
(4)①木尺在支座上水平位置平衡,则使木尺平衡的支座的位置即为木尺的重心;③根据杠杆平衡条件有:MgL1=mgL2,则木尺的质量m=。
故答案为:(1)力臂;(2)先挂钩再确定细线位置;可以使力臂连续改变,便于调节杠杆在水平位置平衡;(3)没有在力臂不相等或作用力不相等的情况下进行多次实验;(4)①重心;③。
16.在“探究杠杆平衡条件的实验”中:
(1)用图甲所示的装置进行实验。实验前,发现杠杆左端下沉,则应将左端的平衡螺母向 右 调节。实验时,在A点挂4个钩码(每个钩码重0.5N),要使杠杆在水平位置平衡,在B点竖直向下拉的弹簧测力计示数F1为 3 N。若弹簧测力计由竖直方向逐渐向左转动某一角度,杠杆仍保持水平平衡,此时弹簧测力计的示数为F2,则两者的大小关系为:F1 小于 F2;
(2)为帮助学生理解力臂,物理老师制作了图乙所示的“杠杆力臂演示仪”(杠杆自身重力和摩擦不计,固定装置未画出),杠杆在水平位置平衡,松开螺母保持OA不动,使OB向下折一个角度后,再拧紧螺母形成一根可绕O点转动的杠杆AOB'(B'点对应B点),保持G1位置不变,要使杠杆在图丙位置保持平衡,则G2应该移动到位置 C (选填字母);
A.B'点处
B.①点处
C.②点处
D.③点处
(3)学以致用:小明家有个木衣架,他把书包挂在衣架A处,已知木衣架重30N,衣架受到重力的作用线经过圆底盘的圆心,圆底盘直径30cm,其他数据如图,为防止木衣架倒下,书包最多重 45 N。
【分析】(1)实验前杠杆,左端向下沉,说明这一侧的力与力臂的乘积较大,故应向右调节平衡螺母;
在A点挂4个钩码,得出钩码的总重力,若每个小格长L,根据杠杆平衡条件F1L1=F2L2可得弹簧测力计的示数;
弹簧测力计由竖直方向逐渐向左转动某一角度,阻力和阻力臂不变,拉力的力臂变小,根据杠杆平衡条件可知,杠杆在水平位置平衡时,拉力的变化情况;
(2)保持G1位置不变,即左边的力和力臂不变,G2不变,要使杠杆在图丙位置保持平衡,应该使右边的力臂不变;原来G₂的力臂为OB,所以G2应该移动到②点处;
(3)衣架在即将倒下时,底盘右侧与地面的接触点为支点,阻力臂为底盘半径,得出L2′和动力臂L′1,
根据杠杆平衡条件可得动力大小,进而得出答案。
【解答】解:(1)实验前杠杆,左端向下沉,说明这一侧的力与力臂的乘积较大,故应向右调节平衡螺母,直到杠杆在水平位置平衡。
在A点挂4个钩码,则钩码的总重力G总=4×0.5N=2N,
若每个小格长L,根据杠杆平衡条件F1L1=F2L2可得,弹簧测力计的示数F1===3N;
弹簧测力计由竖直方向逐渐向左转动某一角度,阻力和阻力臂不变,拉力的力臂变小,根据杠杆平衡条件可知,杠杆在水平位置平衡时,拉力变大,所以F1<F2;
(2)保持G1位置不变,即左边的力和力臂不变,G2不变,要使杠杆在图丙位置保持平衡,应该使右边的力臂不变;原来G₂的力臂为OB,所以G2应该移动到②点处,故ABD不符合题意,C符合题意。
故选C。
(3)衣架在即将倒下时,底盘右侧与地面的接触点为支点,阻力臂为底盘半径,则L2′==15cm=0.15m,动力臂L′1=L﹣L2=25cm﹣15cm=10cm=0.1m,
根据杠杆平衡条件可得F1′==45N。
即书包最多重45N。
故答案为:(1)右;3;小于;(2)C;(3)45。
17.在探究滑轮组机械效率的实验中,实验数据表格如下:
序号
钩码重
G/N
钩码升高
的高度h/m
测力计
示数F/N
绳端移动的
距离s/m
有用功
W有/J
总功
W总/J
机械
效率η
第1次
2
①
1
0.3
②
③
66.7%
第2次
2
0.2
1
0.6
0.4
0.6
66.7%
第3次
4
0.1
1.6
0.3
0.4
0.48
83.3%
第1次实验时,先用测力计测出钩码的重力G;在如图,用测力计缓慢竖直拉绳端,提升钩码,读出测力计示数F,记下钩码升高的高度和绳端移动的距离。
(1)在图甲中,画出滑轮组最省力的绕线方式。
(2)表格中的数据为:① 0.1 ;② 0.3 ;③ 0.2 。
(3)要验证滑轮组机械效率与重物上升高度无关,需选哪几次实验数据作比较? 第1次、第2次 。
(4)根据第1、3次实验数据,写出提高滑轮组机械效率的方法: 增加提升物体的重力 。
【分析】(1)承担物重的绳子段数越多越省力;
(2)根据连接动滑轮绳子的段数和绳子自由端移动的距离,根据s=nh求出钩码上升的高度;根据W=Fs求总功,根据W=Gh求出有用功;
(3)验证滑轮组机械效率与重物上升高度是否有关时,应采用控制变量法;
(4)根据表格中的数据,利用控制变量法分析。
【解答】解:(1)要使滑轮组最省力,需要承担物重的绳子段数最多,所以要从动滑轮绕起如图所示:
;
(2)根据甲中的绕线方式可知,有3段绳子拉着动滑轮,则钩码上升的高度为:h===0.1m;
则有用功为:W有用=Gh=2N×0.1m=0.2J;总功为:W总=Fs=1N×0.3m=0.3J;
(3)要验证滑轮组机械效率与重物上升高度是否有关时,需要控制滑轮组的绕法相同、物体的重力相同,上升的高度不同,需选第1次、第2次实验数据作比较;
(4)根据第1、3次实验数据可知,钩码上升的高度相同,钩码的重力不同,钩码重力越高,机械效率越大,故增加提升物体的重力可以提高机械效率。
故答案为:(1)见解析;(2)0.1;0.3;0.2;(3)第1次、第2次;(4)增加提升物体的重力。
18.在“测量滑轮组的机械效率”实验中,小明用同一滑轮组进行了三次实验(如图所示),实验数据记录如表:
次数
钩码重/N
钩码上升距离/cm
弹簧测力计示数/N
弹簧测力计上升距离/cm
机械效率/%
1
2
10
0.8
30
83.3
2
4
10
1.5
30
★
3
6
10
2.2
30
90.9
(1)实验中要竖直向上缓慢 匀速 拉动弹簧测力计,使钩码升高。
(2)表格中★处数据应为 88.9 (结果保留一位小数)。
(3)分析以上实验数据可以得出结论:同一滑轮组的机械效率与 物重 有关。
(4)根据实验结论推测,使用该滑轮组将重8N的物体匀速提升10cm,此时滑轮组的机械效率可能 C 。
A.71.6%
B.82.4%
C.92.1%
D.100%
(5)另一实验小组改变动滑轮的重,提升同一物体进行多次实验,获得数据并绘制出如图丁的图象。分析可知:被提升物体所受的重力相同时,动滑轮越重,滑轮组机械效率越 低 (高/低);分析图象中的A点可知,此时被提升物体所受的重力 A 。
A.一定大于12N
B.等于12N
C.一定小于12N
【分析】(1)测滑轮组的机械效率,需要匀速拉动绳子,因为整个装置处于平衡状态测力计的示数等于拉力;
(2)利用滑轮组的机械效率η=%来计算;
(3)研究同一滑轮组提升重物时,滑轮组机械效率与提升物体的重力的关系时,要控制其它因素相同,只改变提升物体的重力;
(4)依据同一滑轮组,物重越大机械效率越高判断;
(5)依据滑轮组机械效率与动滑轮重有关进行分析;忽略绳重和摩擦,滑轮组的机械效率η===;即可求出被提升物体所受的重力。
【解答】(1)测滑轮组的机械效率,需要匀速拉动绳子,并且要在拉动中读弹簧测力计的示数此时整个系统处于平衡状态,拉力大小等于测力计示数;
(2)滑轮组的机械效率η=%=×100%=88.9%;
(3)分析表格数据可知,三次实验机械效率不同是由于物重不同造成的;
(4)同一滑轮组,物重越大机械效率越高,故物重8N时机械效率大于物重6N时的机械效率90.9%;而任何机械的效率不可能达到100%;故选C;
(5)由图丁可知,物重一定时,动滑轮越重机械效率越低;根据图丁可知,当动滑轮重为4N时,滑轮组的机械效率为75%;
若忽略绳重和摩擦,滑轮组的机械效率η=====;
即:75%=
所以,被提升物体所受的重力:G=12N;
但由于绳重和摩擦力使得额外功变大,根据η==知,在机械效率不变时,额外功增大,有用功也增大,若提升相同的高度,物体的重力会大于12N,故A正确。
故答案为:(1)匀速;(2)88.9;(3)物重;(4)C;(5)低;A。
19.某小组在“测滑轮组机械效率的实验”中得到的数据如表所示,实验装置如图所示。
实验
序号
钩码重
量G/N
钩码上升
高度h/m
绳端拉
力F/N
绳端移动
距离s/m
机械效率
η
1
4
0.1
2.7
0.2
74%
2
4
0.1
1.8
0.3
74%
3
8
0.1
3.1
0.3
86%
4
8
0.1
2.5
① 0.4
② 80%
(1)实验中应沿竖直方向 匀速 缓慢拉动弹簧测力计,小组同学发现实验过程中边拉动边读数,弹簧测力计示数不稳定,应该静止读数,你认为他的想法 不正确 (选填“正确”或“不正确”)。
(2)用丁图装置进行实验,得出表中第4次实验数据,请将表中的两个数据填写完整。
(3)通过比较 1、2 (填实验序号)两次实验数据得出结论:使用同一滑轮组提升同一重物时,滑轮组的机械效率与绳子段数无关。
(4)通过比较 2、3 (填实验序号)两次实验数据得出结论:同一滑轮组提升重物时,物重越大,滑轮组的机械效率越高。
(5)完成以上实验后,另一小组同学使用甲、乙两个装置(动滑轮自重一样)分别提升重力为G1和G2的两个物体,升高相同的高度。绳自由端施加竖直方向的拉力分别为F1和F2且F1=F2,拉力所做的功分别为W甲、W乙,两装置的机械效率分别为η甲和η乙,若不计绳重与摩擦,则W甲 < W乙,η甲 < η乙。(以上两空均选填:“>”、“<”或“=”)
【分析】(1)实验中应沿竖直方向匀速向上拉动弹簧测力计,使钩码上升,此时系统处于平衡状态,测力计示数等于拉力大小;
若静止读数,测力计没有测量出机械之间的摩擦,测量的拉力偏小;
(2)根据s=nh求出绳子自由端移动的距离;根据η=×100%=×100%求出第4次实验的机械效率;
(3)研究滑轮组的机械效率与绳子段数的关系,要控制提升物体的重力相同和使用同一滑轮组,而绳子段数不同;
(4)研究滑轮组的机械效率与物重的关系,要控制其它因素相同,只改变物重大小,据此分析。
(5)由图可知甲、乙两滑轮组绳子的有效股数,根据s=nh比较两物体提升相同高度时滑轮组绳端移动的距离关系,根据W=Fs可知F1、F2大小相等时拉力做功的关系;
根据F=(G+G动)可知F1、F2大小相等时G甲和G乙的关系,根据η=×100%=×100%=×100%,比较甲、乙两滑轮组的机械效率是否相等。
【解答】解:(1)实验中要竖直向上匀速拉动弹簧测力计,使物体匀速升高,此时系统处于平衡状态,测力计示数才等于拉力大小;
小组同学发现实验过程中边拉动边读数,弹簧测力计示数不稳定,应该静止读数,他的想法不正确,因为他没有考虑到绳子与轮之间的摩擦对测力计示数的影响,从而影响滑轮组的机械效率;
(2)由图丁知,绳子的有效段数n=4,
在第4次实验中,绳端移动的距离:s=4h=4×0.1m=0.4m;
第4次实验测得的机械效率为:η=×100%=×100%=×100%=80%;
(3)根据绳子自由端移动的距离与物体升高的高度的关系:s=nh,在实验1、2、3、4中,绳子的有效段数分别为2、3、3、4,即分别是用甲乙丙丁装置做的实验;
通过比较1、2两次实验数据可得出结论:使用同一滑轮组提升同一重物时,滑轮组的机械效率与绳子段数无关;
(4)通过比较2、3两次实验数据得出结论:同一滑轮组提升重物时,物重越大,滑轮组的机械效率越高;
(5)由图可知,n甲=2,n乙=3,由s=nh可知,两物体提升相同高度时,乙滑轮组绳端移动的距离较大,由W=Fs可知,若F1、F2大小相等,则拉力F2做的功较多,所以W甲<W乙;
不计绳重与摩擦由F=(G+G动)可知,当F1、F2大小相等时,G甲<G乙,由η=×100%=×100%=×100%可知,甲、乙两滑轮组的机械效率相同,所以η甲<η乙。
故答案为:(1)匀速;不正确; (2)0.4;80%;(3)1、2;(4)2、3;(5)<;<。
20.如图所示,是探究“杠杆的平衡条件”的实验装置。
(1)小华实验前发现杠杆右端低,要使它在水平位置平衡,应将杠杆右端的平衡螺母向 左 调节;
(2)如图甲所示,在杠杆左边A处挂3个相同得到钩码,要使杠杆在水平位置平衡,应在杠杆右边B处挂同样的钩码 4 个:
(3)在探究过程中,需要测量和记录动力、动力臂、阻力,阻力臂四个物理量,在进行多次实验的过程中,小华 可以 (选填“可以”或“不可以”)同时改变4个量进行探究测量;
(4)做实验时,当杠杆由图乙的位置变成图丙的位置时,拉力F的力臂 减小 ,弹簧测力计的示数将 不变 ;(以上两空选填“变大”、“变小”或者“不变”,设杠杆质地均匀,支点恰好在杠杆的中心,并且不计支点处摩擦)
(5)调节杠杆在水平位置平衡后,进行如图丁所示的实验,用量程为0~5N的弹簧测力计在A点竖直向上拉(如图丁M所示),杠杆在水平位置平衡时,弹测力计的示数为2.5N。若弹簧测力计斜向上拉(如图丁N所示)。杠杆在水平位置平衡时,弹簧测力计的示数 大于 2.5N(选填“大于”、“小于”或“等于”)。
(6)杆秤是我国古代对杠杆平衡条件的应用。小华用硬杆自制了一个杆秤,杆的粗细不均匀。将提纽固定在O点,提起提纽,托盘中不放重物,将秤砣移至O点左侧的B点,秤杆可以在水平位置平衡,如图戊所示。已知提纽与托盘间距离OA=10cm,OB=2cm,秤砣质量m=0.5kg。关于该杆秤,以下说法正确的是 CD 。
A.秤的零刻线在O点
B.因杆粗细不均匀,所以秤的刻线分布也不均匀
C.秤的2kg刻度线在O点右侧C处,OC=38cm
D.称量物体质量时,若杆秤右端上扬,可将秤砣向右侧适当移动
【分析】(1)若要使杠杆在水平位置平衡,应该将平衡螺母向杠杆上翘的一端移动;
(2)根据杠杆平衡条件分析计算;
(3)测量性实验为了减小误差或者寻找规律进行多次测量,如果物理量是个恒量,多次测量求平均值可以减小实验误差;如果不是测量具体的物理量,而是寻找规律也采取多次测量,寻找普遍性;
(4)力臂指的是支点到力的作用线的距离,杠杆平衡条件:动力×动力臂=阻力×阻力臂,根据杠杆平衡的条件可解决题目;
(5)利用杠杆平衡条件进行判断,阻力和阻力臂的乘积不变,动力臂变化,动力也变化。
要使杠杆在水平位置平衡,阻力和阻力臂的乘积不变,动力和动力臂的乘积应该也不变,最大的动力是5N,求出最小的动力臂,求出弹簧测力计和杠杆的夹角,求出拉力的方向与竖直方向的最大夹角;
(6)杆秤利用的是杠杆的平衡条件,通过力臂的大小关系得出物体重和秤砣重之间的关系,进而得出物体的质量与秤砣的质量之间的关系,测量的是物体的质量。
【解答】解:(1)杠杆的右端低,左边上翘,因此要想使杠杆在水平位置平衡,应将平衡螺母向左调节;
(2)设杠杆每个格的长度为L,每个钩码的重力为G,根据杠杆的平衡条件:FALA=FBLB,即3G×4L=FB×3L,解得FB=4G,需挂4个钩码;
(3)在“探究杠杆平衡条件”实验时本实验中,可以同时改变动力(臂)和阻力(臂),多次进行实验行多次测量的目的是:避免实验次数过少,导致实验结论具有偶然性,便于从中寻找规律;
(4)做实验时杠杆已达到平衡,当杠杆由图乙的位置变成图丙的位置时,拉力F的力臂减小,其动力臂、阻力臂的比值是不变的,所以在阻力不变的情况下,根据杠杆平衡条件F1L1=F2L2分析可知动力是不变的;
(5)弹簧测力计竖直向上拉动杠杆时,动力臂是OA,当斜向上拉动杠杆时,动力臂变为OC,阻力和阻力臂的乘积不变,动力臂变小,根据杠杆平衡条件,动力变大,所以弹簧测力计示数大于2.5N;
(6)A、将提纽固定在O点,提起提纽,托盘中不放重物,将秤砣移至O点左侧的B点,秤杆可以在水平位置平衡,因此B点应该为零刻度线,故A错误;
B、无论杆秤粗细是否均匀,秤的刻度线分布都是均匀的,因为无论杆秤粗细是否均匀,由杠杆平衡条件F1L1=F2L2可知,动力臂与阻力的大小成正比,故B错误;
C、由题意知B点为零刻度线,则OA=10cm,OB=2cm,
利用支点左端力与力臂乘积的变化量等于右端力与力臂乘积变化量:m1g×OA﹣m2×OB=m2g×OC,
即2kg×10N/kg×10cm﹣0.5kg×10N/kg×2cm=0.5kg×10N/kg×OC,
解得:OC=38cm,
故C正确;
D、秤杆右端上扬,即为左端重,应将秤砣向右移,增加力臂使其平衡,故D正确。
故选:CD。
故答案为:(1)左;(2)4;(3)可以;(4)不变;(5)大于;(6)CD。
相关试卷
2023年中考物理实验与探究训练 专题11 简单的机械和功: 这是一份2023年中考物理实验与探究训练 专题11 简单的机械和功,文件包含专题11简单的机械和功解析版docx、专题11简单的机械和功原卷版docx等2份试卷配套教学资源,其中试卷共53页, 欢迎下载使用。
专题11 简单的机械和功-中考物理实验与探究专题训练(全国通用): 这是一份专题11 简单的机械和功-中考物理实验与探究专题训练(全国通用),文件包含专题11简单的机械和功解析版docx、专题11简单的机械和功原卷版docx等2份试卷配套教学资源,其中试卷共51页, 欢迎下载使用。
专题08 力-中考物理实验与探究专题训练(全国通用): 这是一份专题08 力-中考物理实验与探究专题训练(全国通用),文件包含专题08力解析版docx、专题08力原卷版docx等2份试卷配套教学资源,其中试卷共46页, 欢迎下载使用。










