



所属成套资源:浙教版信息技术九年级PPT课件+教案全册
初中信息技术浙教版 (2020)九年级全册第三单元 智能机器人第11课 机器人行走获奖课件ppt
展开
这是一份初中信息技术浙教版 (2020)九年级全册第三单元 智能机器人第11课 机器人行走获奖课件ppt,文件包含九年级全册信息技术浙教版第三单元第11课机器人行走课件pptx、九年级全册信息技术浙教版第三单元第11课机器人行走教案doc等2份课件配套教学资源,其中PPT共25页, 欢迎下载使用。
目前教学使用的机器人有两种形式:
1、有固定外形的机器人,如通用机器人,其特点是:方便安装;
2、积木式机器人,如乐高机器人,其特点是:变化多端。
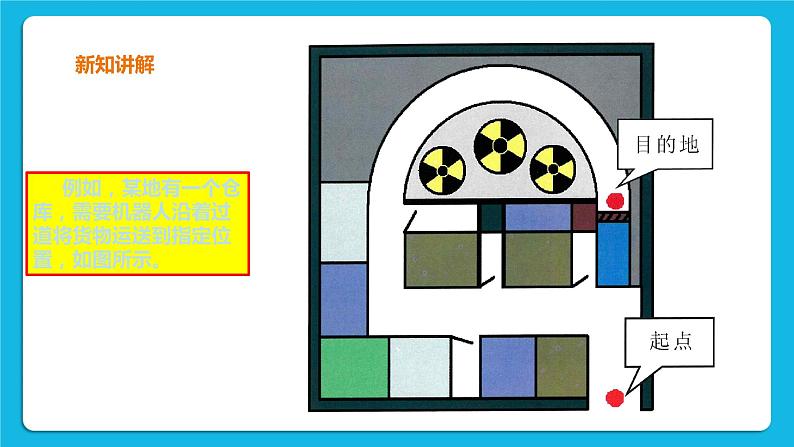
例如,某地有一个仓库,需要机器人沿着过道将货物运送到指定位置,如图所示。
根据该仓库平面图,可以规划机器人行走的路线,如图所示。
机器人运送货物到指定地点,也就是让机器人沿着规划的路线行走:
①机器人从门口开始前进一段距离;
⑤前进一段距离到半圆弧起点
⑥走弧线到达目的地。
根据上述分析画出流程图,如图所示。
1.配件:主机1个,马达2个,随动轮1个。
2.左马达所接的端口号:( ) 右马达所接的端口号:( )
程序需要“移动”“延时”和“停止”三个模块
1.“移动”模块主要控制左、右电机的转速与转向,通过不同的设置可以实现直行、走孤线原地转向等运动状态。
2.“延时”模块能使前面的“移动”状态持续一段时间,从而实现符合要求的转角或移动距离。
如图中的“直行①”,就由“移动”和“延时”两个模块完成。
“停止”模块能停止电机的转动。
采取逐段编程调试的方法完成本项行走任务,以提高调试效率。
一、问题分析二、设计流程图三、项目实施
1.设计一个机器人让它沿正方形行走。
相关课件
这是一份浙教版 (2020)九年级全册第15课 机器人灭火优秀课件ppt,文件包含九年级全册信息技术浙教版第三单元第15课机器人灭火课件pptx、九年级全册信息技术浙教版第三单元第15课机器人灭火教案doc等2份课件配套教学资源,其中PPT共23页, 欢迎下载使用。
这是一份初中信息技术浙教版 (2020)九年级全册第三单元 智能机器人第13课 机器人认路一等奖课件ppt,文件包含九年级全册信息技术浙教版第三单元第13课机器人认路课件pptx、九年级全册信息技术浙教版第三单元第13课机器人认路教案doc等2份课件配套教学资源,其中PPT共26页, 欢迎下载使用。
这是一份浙教版 (2020)九年级全册第三单元 智能机器人第12课 机器人巡逻优秀ppt课件,文件包含九年级全册信息技术浙教版第三单元第12课机器人巡逻课件pptx、九年级全册信息技术浙教版第三单元第12课机器人巡逻教案doc等2份课件配套教学资源,其中PPT共22页, 欢迎下载使用。








