
资料中包含下列文件,点击文件名可预览资料内容






还剩15页未读,
继续阅读
所属成套资源:浙教版信息技术九年级PPT课件+教案全册
成套系列资料,整套一键下载
浙教版 (2020)九年级全册第15课 机器人灭火优秀课件ppt
展开
这是一份浙教版 (2020)九年级全册第15课 机器人灭火优秀课件ppt,文件包含九年级全册信息技术浙教版第三单元第15课机器人灭火课件pptx、九年级全册信息技术浙教版第三单元第15课机器人灭火教案doc等2份课件配套教学资源,其中PPT共23页, 欢迎下载使用。
在很多火灾现场存在易燃易爆、中毒、缺氧窒息等危险情形
消防机器人代替消防救援人员进入现场进行数据采集、火灾处理、信息反馈,能有效解决消防人员面临的人身安全、数据信息采集不足等问题(如图所示)。
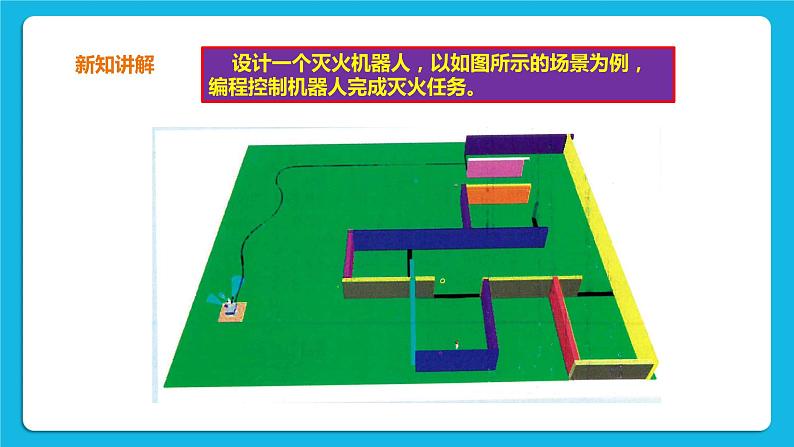
设计一个灭火机器人,以如图所示的场景为例,编程控制机器人完成灭火任务。
火焰传感器基本工作原理:经过信号放大电路,火焰传感器电路将感受到红外光程度以高低电平形式输出至单片机系统, 由状态显示系统进行显示。
远红外火焰传感器安装使用时注意以下几点:
1.将远红外火焰传感器直接接在光敏接口上。
2.远红外火焰传感器的插针是有极性的,安装时将红线接在主板上画有“+”的位置;如在使用时无反应,只要将传感器反插就可以了。
3.在图形化编程时,直接用“亮度检测模块”控制;在代码框编程时,使用函数pht(1)和pht(2)检测。
4.远红外火焰探头的工作温度为-25摄氏度~85摄氏度,在使用过程中应注意火焰探头离火焰的距离不能太近,以免造成损坏。
根据场景,机器人需从起点出发,沿着路线前行到建筑群,然后在建筑物中寻找火源,发现火源后立即启动灭火。
路线由一条黑线表示,因此,机器人需要具有循迹能力并在建筑物中寻找火源,需要机器人能避障行走。
完成灭火任务的具体思路如下:
(1)从起点出发,沿黑线走到建筑群。
(2)利用走迷宫的方法在建筑群中避障行走寻找火源,当检测到火源后机器人停止前进。
根据问题分析,设计机器人灭火流程图如图所示。
1.配件:主机1个,马达2个,随动轮1个,灭火电机1个,小风扇。
2.左电机的端口号:( )右电机的端口号:( )风扇电机的端口号:( )
3.灰度传感器2个,左边传感器的端口:( )右边传感器的端口:( )
轮子与灰度传感器安装的位置
4.红外测障传感器3个,左边传感器的端口号:( )左前方传感器的端口号:( )前方传感器的端口号:( )
5. 火焰传感器1个,接在正前方,它的端口号:( )
红外、火焰传感器、风扇安装的位置
场地中有轨迹、迷宫和蜡烛。具体设计可以根据实际需要适当调整。
1.红外传感器检测到障碍时的信号值是( )检测不到障碍的信号值是( )接近火源时,火焰传感器的信号值是( )
2.子程序的新建、保存和引用操作。
3.流程图中“启动电机灭火”的编程需要“启动电机”和“延时”两个模块。
任务相对复杂,可采取分步调试。
一、问题分析二、设计流程图三、项目实施
1.根据所学知识设计一个踢足球的足球机器人。
在很多火灾现场存在易燃易爆、中毒、缺氧窒息等危险情形
消防机器人代替消防救援人员进入现场进行数据采集、火灾处理、信息反馈,能有效解决消防人员面临的人身安全、数据信息采集不足等问题(如图所示)。
设计一个灭火机器人,以如图所示的场景为例,编程控制机器人完成灭火任务。
火焰传感器基本工作原理:经过信号放大电路,火焰传感器电路将感受到红外光程度以高低电平形式输出至单片机系统, 由状态显示系统进行显示。
远红外火焰传感器安装使用时注意以下几点:
1.将远红外火焰传感器直接接在光敏接口上。
2.远红外火焰传感器的插针是有极性的,安装时将红线接在主板上画有“+”的位置;如在使用时无反应,只要将传感器反插就可以了。
3.在图形化编程时,直接用“亮度检测模块”控制;在代码框编程时,使用函数pht(1)和pht(2)检测。
4.远红外火焰探头的工作温度为-25摄氏度~85摄氏度,在使用过程中应注意火焰探头离火焰的距离不能太近,以免造成损坏。
根据场景,机器人需从起点出发,沿着路线前行到建筑群,然后在建筑物中寻找火源,发现火源后立即启动灭火。
路线由一条黑线表示,因此,机器人需要具有循迹能力并在建筑物中寻找火源,需要机器人能避障行走。
完成灭火任务的具体思路如下:
(1)从起点出发,沿黑线走到建筑群。
(2)利用走迷宫的方法在建筑群中避障行走寻找火源,当检测到火源后机器人停止前进。
根据问题分析,设计机器人灭火流程图如图所示。
1.配件:主机1个,马达2个,随动轮1个,灭火电机1个,小风扇。
2.左电机的端口号:( )右电机的端口号:( )风扇电机的端口号:( )
3.灰度传感器2个,左边传感器的端口:( )右边传感器的端口:( )
轮子与灰度传感器安装的位置
4.红外测障传感器3个,左边传感器的端口号:( )左前方传感器的端口号:( )前方传感器的端口号:( )
5. 火焰传感器1个,接在正前方,它的端口号:( )
红外、火焰传感器、风扇安装的位置
场地中有轨迹、迷宫和蜡烛。具体设计可以根据实际需要适当调整。
1.红外传感器检测到障碍时的信号值是( )检测不到障碍的信号值是( )接近火源时,火焰传感器的信号值是( )
2.子程序的新建、保存和引用操作。
3.流程图中“启动电机灭火”的编程需要“启动电机”和“延时”两个模块。
任务相对复杂,可采取分步调试。
一、问题分析二、设计流程图三、项目实施
1.根据所学知识设计一个踢足球的足球机器人。
相关课件
初中信息技术浙教版 (2020)九年级全册第三单元 智能机器人第13课 机器人认路一等奖课件ppt: 这是一份初中信息技术浙教版 (2020)九年级全册第三单元 智能机器人第13课 机器人认路一等奖课件ppt,文件包含九年级全册信息技术浙教版第三单元第13课机器人认路课件pptx、九年级全册信息技术浙教版第三单元第13课机器人认路教案doc等2份课件配套教学资源,其中PPT共26页, 欢迎下载使用。
浙教版 (2020)九年级全册第三单元 智能机器人第12课 机器人巡逻优秀ppt课件: 这是一份浙教版 (2020)九年级全册第三单元 智能机器人第12课 机器人巡逻优秀ppt课件,文件包含九年级全册信息技术浙教版第三单元第12课机器人巡逻课件pptx、九年级全册信息技术浙教版第三单元第12课机器人巡逻教案doc等2份课件配套教学资源,其中PPT共22页, 欢迎下载使用。
初中信息技术浙教版 (2020)九年级全册第三单元 智能机器人第11课 机器人行走获奖课件ppt: 这是一份初中信息技术浙教版 (2020)九年级全册第三单元 智能机器人第11课 机器人行走获奖课件ppt,文件包含九年级全册信息技术浙教版第三单元第11课机器人行走课件pptx、九年级全册信息技术浙教版第三单元第11课机器人行走教案doc等2份课件配套教学资源,其中PPT共25页, 欢迎下载使用。











