














所属成套资源:人教版八下物理课件+教案+导学案+同步练习+内嵌视频
人教版八下物理 第十二章《简单机械》 课件+同步练习+内嵌视频
展开
这是一份【人教版】八下物理 第十二章《简单机械》 课件+同步练习+内嵌视频,文件包含第十二章《简单机械》本章复习pptx、第十二章《机械效率》单元测试题解析版docx、第十二章《机械效率》单元测试题原卷版docx等3份课件配套教学资源,其中PPT共60页, 欢迎下载使用。
单 元 复 习
CHUZHONGWULI
第十二章 简单机械
物理
人教版 物理 八年级 下册
第1节
杠 杆
本章内容
第2节
滑 轮
第3节
机械效率
本章内容结构
第1节 杠杆
在力的作用下能绕固定点转动的硬棒
支点0:杠杆绕着转动的固定点
动力F1:使杠杆转动的力(人施加的力)
阻力F2:阻碍杠杆转动的力(物体施加的力)
动力臂l1:从支点到动力作用线的距离
阻力臂l2:从支点到阻力作用线的距离
平衡:杠杆在动力和阻力作用下保持静止或或匀速转动
平衡条件:动力×动力臂=阻力×阻力臂
F1l1=F2l2
等臂杠杆:l1=l2 F1=F2,不省力,也不费距离
五要素
杠杆平衡
杠杆分类
杠杆
知识结构
第1节 杠杆
费力杠杆:l1<l2 F1>F2,费力,省距离
省力杠杆:l1>l2 F1<F2,省力,费距离
知识点一:杠杆
第1节 杠杆
1. 杠杆的概念:一根硬棒,在力的作用下能绕着固定点转动,这根硬棒就是杠杆。
②一根硬棒要成为杠杆,应具备两个条件: 要有力的作用;能绕某一固定点转动。同时满足,缺一不可。
注意: ① “硬棒” 是指在力的作用不发生形变。杠杆可以是直的,也可以是弯曲的。
2. 杠杆的“五要素”
注意:“力的作用线” 是指过力的作用点沿力的方向所画的直线。不是支点到作用点的距离。
支点0:杠杆绕着转动的固定点.
动力F1:使杠杆转动的力(人施加的力).
阻力F2:阻碍杠杆转动的力(物体施加的力).
动力臂l1:从支点到动力作用线的距离.
阻力臂l2:从支点到阻力作用线的距离.
知识点一:杠杆
第1节 杠杆
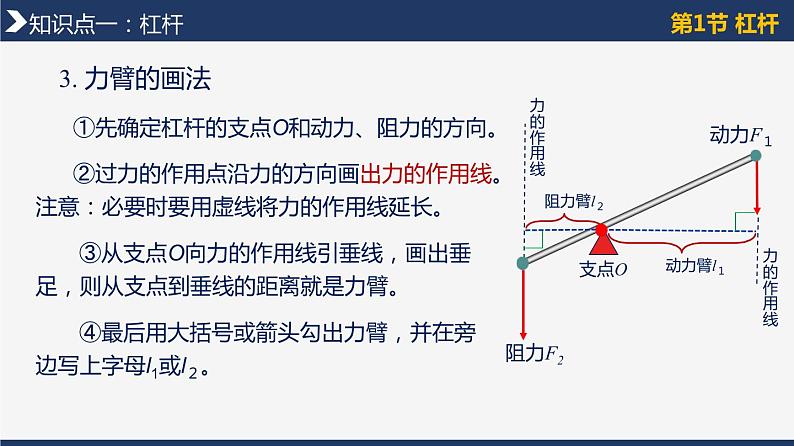
3. 力臂的画法
③从支点O向力的作用线引垂线,画出垂足,则从支点到垂线的距离就是力臂。
②过力的作用点沿力的方向画出力的作用线。注意:必要时要用虚线将力的作用线延长。
①先确定杠杆的支点O和动力、阻力的方向。
④最后用大括号或箭头勾出力臂,并在旁边写上字母l1或l2。
力的作用线
力的作用线
知识点一:杠杆
第1节 杠杆
注意:力臂包含了力的作用点和力的方向两个要素。力臂不一定在杠杆上,当力的作用线与杠杆不垂直时,力臂与杠杆不重合。
如图所示,当杠杆在水平方向上平衡时,阻力F2的方向与杠杆垂直,其阻力臂为20cm,与杠杆重合。动力F1的方向与杠杆不垂直,其动力臂L1不在杠杆上。
知识点一:杠杆
第1节 杠杆
4. 动力与阻力
支点一定在杠杆上。动力和阻力可以在支点两侧,也可在支点同侧;作用在杠杆上的动力和阻力的方向既可以相同,也可以相反,但是使杠杆转动的方向一定是相反的。
动力和阻力在支点两侧,方向相同。动力使杠杆顺时针转动;阻力使杠杆逆时针转动,动力和阻力对杠杆的转动效果相反。
动力和阻力在支点同侧,方向相反。动力使杠杆逆时针转动;阻力使杠杆顺时针转动,动力和阻力对杠杆的转动效果相反。
知识点一:杠杆
第1节 杠杆
知识点二:杠杆的平衡条件
第1节 杠杆
杠杆平衡时:动力×动力臂=阻力×阻力臂
计算公式:
F1 l1=F2 l2
或变形式:
作用在杠杆上两个力的大小与他们的力臂成反比
2. 杠杆的平衡条件
①应用公式计算时,单位要统一,即动力和阻力的单位要用牛(N),动力臂和阻力臂的单位要相同。
②杠杆是否平衡,取决于力和力臂的乘积:乘积相等就平衡;否则沿着乘积大的那端转动。
1. 杠杆的平衡: 杠杆在动力和阻力作用下静止或匀速转动时,就说杠杆平衡。
①杠杆是否平衡是由动力、阻力、动力臂和阻力臂共同决定的。为了研究其平衡条件,可以在杠杆处于平衡状态时,分别测出动力F1、阻力F2、动力臂l1和阻力臂l2,然后经过大量的数据对比,归纳出杠杆的平衡条件。
知识点二:杠杆的平衡条件
第1节 杠杆
②实验器材:杠杆、钩码、铁架台、弹簧测力计。
③实验表格
设计实验
3. 探究杠杆的平衡条件
①把杠杆安装在支架上,调节杠杆两端的平衡螺母, 使杠杆在水平位置平衡。
知识点二:杠杆的平衡条件
第1节 杠杆
②在杠杆两边挂不同数量的钩码,把支点右边的钩码对杠杆的作用力当作动力F1,支点左边的钩码对杠杆的作用力当作阻力F2。
调节钩码的位置,使杠杆在水平位置重新平衡,将动力F1、阻力F2、动力臂L1、阻力臂L2的实验数据填入表中。
进行实验
③改变阻力和阻力臂的大小,相应调节动力和动力臂的大小,使杠杆在水平位置重新平衡,再做几次实验。
知识点二:杠杆的平衡条件
第1节 杠杆
④在杠杆的一侧挂上钩码作为阻力,通过在其他位置上用弹簧测力计拉住杠杆的办法使杠杆平衡。将动力F1、阻力F2、动力臂l1、阻力臂l2记录在表格中。
注意:弹簧测力计只有沿竖直方向施加力,才可以直接读出力臂。
实验结果表明,动力臂越长,需要的力越小;动力臂越短,需要的力越大。二者之间是反比关系。
实验结论:
杠杆平衡时,动力×动力臂=阻力×阻力臂,即F1 L1 = F2 L2
知识点二:杠杆的平衡条件
第1节 杠杆
分析论证
①杠杆在水平位置静止的目的是: 一是使杠杆的重心在支点,以消除杠杆自身重力对实验的影响;二是便于直接读出力臂。
②多次测量获得多组实验数据的目的是: 避免偶然性,获得普遍性的结论。
③在实验前要调节杠杆两端的平衡螺母,使杠杆水平平衡。挂钩码后,不能再调节平衡螺母。
④读数时,杠杆仍要保持处于水平平衡状态,以便直接读出力臂的长度。
知识点二:杠杆的平衡条件
第1节 杠杆
交流评估
∟
⑤弹簧测力计一定沿竖直方向施加力。
如图(a)所示,弹簧测力计沿竖直方向施加力时,力臂l1=10cm,可以直接读出。
如图(b)所示,弹簧测力计不沿竖直方向施力,力臂为l2, l2 <l1=10cm,不能直接从杠杆上读出。
知识点二:杠杆的平衡条件
第1节 杠杆
根据杠杆的平衡条件进行分析:
F1 l1=F2 l2
1. 三种杠杆
知识点三:生活中的杠杆
第1节 杠杆
省力费距离
省距离费力
不省力也不省距离
撬棍、扳手、钢丝钳
天平、跷跷板
镊子、鱼竿、筷子
l动>l阻
l动<l阻
l动=l阻
视频总结——《杠杆与杠杆的平衡条件》
【例题1】如图为运动员手持铅球(图中未画出)时的情景。此时,手臂受力时可简化为桡骨在肱二头肌的牵引下绕肘关节转动的模型。关于这个物理模型,下列选项正确的是_______。
①图甲中的 l1、l2分别表示F1和F2的力臂②图乙中的l1、l2分别表示F1和F2的力臂③手臂是个省力杠杆④手臂是个费力杠杆
② ④
解析见下页
第1节 杠杆
过支点作力的作用线的垂线段,该垂线段为力臂,图甲中l2的力臂错误,图乙中的两个力臂正确,故①错误,②正确;由图乙可知,此时的动力臂小于阻力臂,为费力杠杆,故③错误, ④正确。
故选②④ 。
第1节 杠杆
【例题2】在“探究杠杆平衡条件”的实验中:①如图甲所示,实验前杠杆左端下沉,则应将平衡螺母向_____(选填“左”或“右”)调节,直到杠杆在______位置平衡;
①探究杠杆平衡条件实验前,要调节杠杆在水平位置平衡,调节的方法是哪端高,平衡螺母向哪端调节,图中杠杆左端下沉,故应将平衡螺母向右调节,直到杠杆在水平位置平衡。
水平
右
第1节 杠杆
②如图乙所示,杠杆上刻度均匀,在A点挂3个钩码,要使杠杆在水平位置平衡,应在B点挂_____个相同的钩码;当杠杆平衡后,将A、B两点下方同时增加一个相同的钩码,则杠杆将__________(选填“左端下沉”、“右端下沉”或“仍保持静止不动”);
②据杠杆的平衡条件F1l1=F2l2,设杠杆的1格长为L,每个钩码重力为G,则左边力与力臂乘积为3G×4L=12GL.右边力臂长为3L,故所挂钩码重为: 故右边B点处应挂4个钩码,杠杆在水平位置平衡。
当杠杆平衡后,将A、B两点下方同时增加一个相同的钩码,由于左边的力臂大于右边力臂,可知两边增加的力与力臂乘积左边大于右边,故杠杆将左端下沉。
4
左端下沉
第1节 杠杆
③如图丙所示,若不在B点挂钩码,改用弹簧测力计在C点竖直向上拉杠杆,使杠杆在水平位置平衡;当弹簧测力计从图丙位置转到图丁位置时,其示数会______(选填“变大”、“不变”或“变小”),原因是____________。
③若不在B点挂钩码,改用弹簧测力计在C点竖直向上拉杠杆,使杠杆在水平位置平衡;当弹簧测力计从图丙位置转到图丁位置时,拉力的力臂逐渐减小,由阻力和阻力臂的乘积不变,可得弹簧测力计示数将变大。
变大
力臂变小
第1节 杠杆
【例题3】如图所示是小明同学做俯卧撑时的示意图,他的质量为56kg,身体可视为杠杆,O点为支点,A点为重心。(g=10N/ kg)(1)该同学所受重力是多少?(2)在图中画出该同学所受重力的示意图,并画出重力的力臂l1;(3)若OB=1.0m,BC=0.4m,求地面对双手支持力的大小。
解析见下页
第1节 杠杆
(1)该同学的重力 G=mg=56 kg ×10N/ kg=560N(2)该同学所受重力的示意图如下,以O点为支点,过O点作重力作用线的垂线段,即为重力的力臂l1.(3)地面对双手支持力F的方向竖直向上,其力臂长度为 OC=OB+ BC=1.0m+0.4m=1.4m 根据杠杆的平衡条件得 G·OB=F ·OC 可得
第1节 杠杆
【例题4】如图所示,两个和尚用轻质扁担抬水,水桶和水的总重力为200 N。扁担在水平位置平衡时,水桶细绳悬挂点与甲和尚肩上支撑点距离为0.8米,距乙和尚肩上支撑点为1.2米。(g=10 N/kg)求:(1)水桶和水的总质量;(2)乙和尚对扁担的支持力;(3)当乙和尚独自把肩膀往后挪(增加肩上支撑点与桶细绳悬挂点的距离),则甲和尚对扁担的支持力有何变化?(只需回答结果,不必写出原因)
解析见下页
第1节 杠杆
【例题4】水桶和水的总重力为200 N。扁担在水平位置平衡时,水桶细绳悬挂点与甲和尚肩上支撑点距离为0.8m,距乙和尚肩上支撑点为1.2m(g=10 N/kg)。求:(1)水桶和水的总质量;(2)乙和尚对扁担的支持力;
第1节 杠杆
(3)当乙和尚独自把肩膀往后挪(增加肩上支撑点与桶细绳悬挂点的距离),则甲和尚对扁担的支持力有何变化?(只需回答结果,不必写出原因)
(3)以甲和尚肩为支点,当乙和尚独自把肩膀往后挪,乙的力臂l乙变大,水桶重力G不变,桶重力的力臂l桶不变,根据F乙l乙=Gl桶,乙对扁担支持力F乙变小。因为甲、乙对扁担支持力之和为水桶总重是不变F甲+F乙=G桶,乙对扁担支持力减小,甲对扁担支持力就增大。
第1节 杠杆
第2节 滑轮
知识结构
第2节 滑轮
定滑轮、动滑轮、滑轮组的比较 (不计绳重、摩擦)
F=G
s=h
不省力不省距离能改变力的方向
s=2h
省力、费距离,不能改变力的方向
s=nh(n为动滑轮上绳子段数)
省力、费距离,能否改变力的方向和绕线方式有关
① 定滑轮:使用时,轴固定不动的滑轮,叫定滑轮。
② 定滑轮的特点
1. 定滑轮
定滑轮
F
G
知识点一、定滑轮和动滑轮
第2节 滑轮
③定滑轮的实质——等臂杠杆
如图所示,定滑轮的轴心O为支点,动力臂l1与阻力臂l2都是滑轮的半径r。
F=G
F1l1=F2l2
l1=l2=r
Fl1=Gl2
通过理论分析可知,定滑轮实质上是一个等臂杠杆,所以不省力。
知识点一、定滑轮和动滑轮
第2节 滑轮
④用平衡力的知识研究定滑轮的特点
在忽略摩擦的情况下,物体受到重力G和拉力F的作用。由于物体匀速上升,所以拉力F跟物体的重力G是一对平衡力,大小相等: F=G
使用定滑轮不省力,可以改变力的方向。
物体向上运动,用力却是往下拉,所以使用定滑轮能改变力的方向.
知识点一、定滑轮和动滑轮
第2节 滑轮
①动滑轮:工作时,轴随着物体移动的滑轮叫动滑轮。
2. 动滑轮
②动滑轮的特点
动滑轮
S绳=2h物
F
G
知识点一、定滑轮和动滑轮
第2节 滑轮
③动滑轮的实质
动滑轮的实质是一个动力臂为阻力臂二倍的杠杆。
动滑轮相当于一根杠杆,支点在绳和轮相切的A处;拉力F是动力,重物的拉力是阻力G;动力臂l1是轮直径、阻力臂l2是轮半径。
根据杠杆的平衡条件:Fl1=Gl2
知识点一、定滑轮和动滑轮
第2节 滑轮
④用平衡力的知识研究动滑轮的特点
G动
知识点一、定滑轮和动滑轮
第2节 滑轮
①滑轮组:将定滑轮和动滑轮组合在一起就组成了滑轮组。
不计绳重和摩擦但考虑滑轮重:
1. 滑轮组
②滑轮组的特点:
知识点二、滑轮组
第2节 滑轮
2. 滑轮组的组装与设计
知识点二、滑轮组
第2节 滑轮
①轮轴:由具有共同转动轴的大轮和小轮组成。大轮叫轮,小轮叫轴。
根据杠杆的平衡条件: F1l1 = F2l2
当动力作用在轴上时,轮轴是一个费力杠杆,但省距离。
∵ R >r,∴ F



