


还剩15页未读,
继续阅读
所属成套资源:沪教版物理八年级全一册 课件
成套系列资料,整套一键下载
沪科版八年级全册第一节 科学探究:杠杆的平衡条件教课内容ppt课件
展开
这是一份沪科版八年级全册第一节 科学探究:杠杆的平衡条件教课内容ppt课件,共23页。PPT课件主要包含了你认识下面的工具吗,大型机床,课堂小结等内容,欢迎下载使用。
认识下面的工具吗?
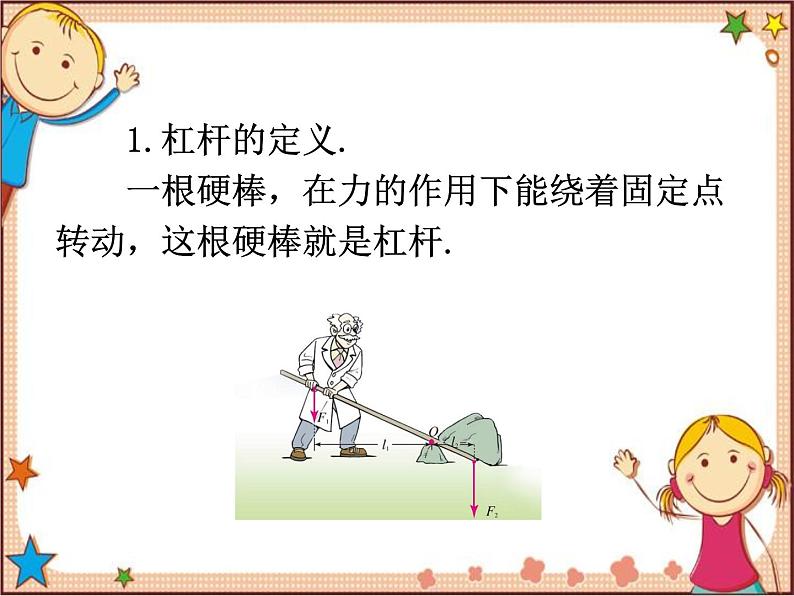
1.杠杆的定义. 一根硬棒,在力的作用下能绕着固定点转动,这根硬棒就是杠杆.
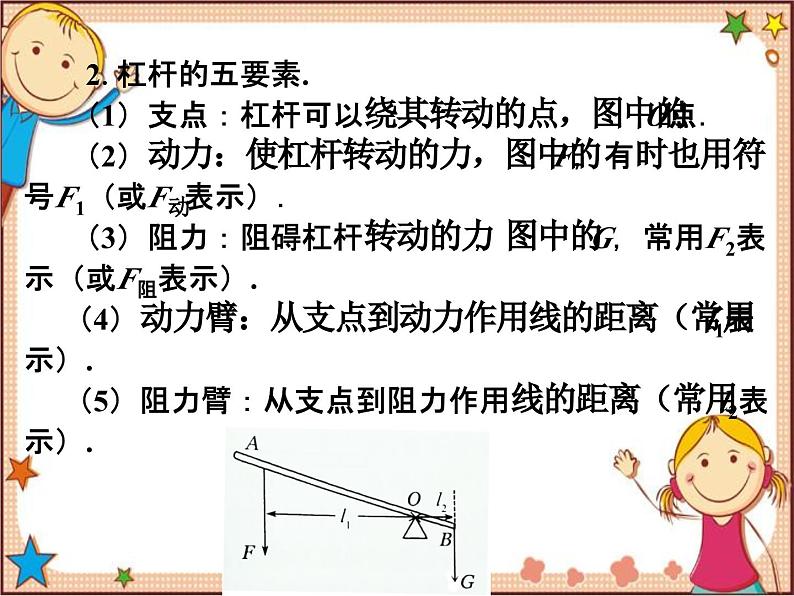
2.杠杆的五要素. (1)支点:杠杆可以绕其转动的点,图中的O点. (2)动力:使杠杆转动的力,图中的F,有时也用符号F1(或F动表示). (3)阻力:阻碍杠杆转动的力,图中的G,常用F2表示(或F阻表示). (4)动力臂:从支点到动力作用线的距离(常用l1表示). (5)阻力臂:从支点到阻力作用线的距离(常用l2表示).
3.画杠杆力臂的基本方法. (1)找出支点. (2)沿力的方向画出力的作用线(虚线). (3)从支点作力的作用线的垂线,支点到垂足的距离即为力臂.
注意事项: 1.动力和阻力是没有严格界限的,但不论是动力还是阻力,杠杆都是受力物体. 2.力臂是从支点到力的作用线的垂直距离,而不是支点到力的作用点的距离. 3.力臂有时恰在杠杆上,有时不在杠杆上. 如果力的作用线恰好通过支点,则力的力臂为零,若施加的力的力臂为零,则该力对杠杆没有转动效果.
杠杆处于静止状态或绕支点匀速转动都叫做杠杆平衡. 杠杆不论在什么位置静止,都可以称为平衡状态. 杠杆缓慢转动、将要转动,也属于杠杆平衡状态. 杠杆处于平衡状态时,有什么特点呢?
探究杠杆的平衡条件:设计与进行实验: 实验器材:杠杆、铁架台、钩码等. 实验步骤: (1)调节杠杆两端的平衡螺母,使杠杆在水平位置平衡.
(2)在杠杆的两边分别挂上数目不等的两串钩码,通过移动钩码悬挂的位置,使杠杆在水平位置重新平衡.
(3)测量并记录此时杠杆的动力(F1)、动力臂(l1)、阻力(F2)、阻力臂(l2). (4)改变动力和阻力的大小,重复上述步骤,将实验数据记录在表格中.
分析表格中的数据,比较F1×l1与F2×l2的大小,得出结论. 杠杆的平衡条件是: 动力×动力臂=阻力×阻力臂(或写作F1l1=F2l2) 对于不能确定究竟哪个是动力、哪个是阻力的情况,我们可以根据需要假定,但力与力臂必须对应,不可混淆.
思考讨论: 步骤1中为什么调节杠杆两端的螺母,使杠杆在水平位置平衡? 杠杆的平衡是指杠杆静止不转动或杠杆匀速转动.杠杆只有在水平位置平衡,从支点到动(阻)力作用线的距离,即力臂的长度,才可从杠杆上的刻度值直接读出.
步骤2中为什么在杠杆两边挂上不同数量的钩码,调节钩码位置,使杠杆在水平位置重新平衡? 在杠杆两边挂上不同数量的钩码,则杠杆在水平位置重新平衡时可使支点到动(阻)力作用线的距离不同(钩码位置),便于实验研究.
注意事项: 判断杠杆是否平衡不能只比较F1 和F2的大小,也不能只比较l1和 l2的大小,必须比较F1·l1与F2·l2的大小,若它们乘积相等,则杠杆平衡;哪一边的乘积大,杠杆就向那一边倾斜.
根据杠杆平衡条件F1l1=F2l2,将公式做简单的分析,可以得到三种类型的杠杆. (1)省力杠杆:当l1>l2时,F1<F2,即动力臂大于阻力臂时,动力小于阻力,这种杠杆叫省力杠杆. 例如,铡刀、起子、指甲刀等,它们虽然省力,但是费距离.
(2)费力杠杆:当l1<l2时,F1>F2,即动力臂小于阻力臂时,动力大于阻力,这种杠杆叫费力杠杆. 例如,筷子、镊子、钓鱼竿等,它们虽然费力,但是省距离. (3)等臂杠杆:当l1=l2时,F1=F2,即动力臂等于阻力臂时,动力等于阻力,这种杠杆叫等臂杠杆. 例如,天平、定滑轮等,它们既不省力,也不省距离.
1.杠杆:在力的作用下能绕着固定点转动的一根硬棒. 2.杠杆的五要素:支点、动力、动力臂、阻力、阻力臂. 3.杠杆力臂的画法:过支点作力的作用线的垂线,垂线段的长度就是力臂.
1.如图所示,各式各样的剪刀都是一对对 杠杆,要剪开较硬的物体,使用哪种剪 刀最合适 ( )
2.如图所示,轻质杠杆OA可绕O点转动;OA=0.3 m,OB=0.2 m,A点处挂一个质量为2 kg的物体G,B点处加一个竖直向上的力F,杠杆在水平位置平衡,则物体G的重力大小为______N,力F的大小为_____N.(取g=10 N/kg)
3.请在图甲中画出作用在“开瓶起子”上的动力F1的力臂和阻力F2的示意图.
认识下面的工具吗?
1.杠杆的定义. 一根硬棒,在力的作用下能绕着固定点转动,这根硬棒就是杠杆.
2.杠杆的五要素. (1)支点:杠杆可以绕其转动的点,图中的O点. (2)动力:使杠杆转动的力,图中的F,有时也用符号F1(或F动表示). (3)阻力:阻碍杠杆转动的力,图中的G,常用F2表示(或F阻表示). (4)动力臂:从支点到动力作用线的距离(常用l1表示). (5)阻力臂:从支点到阻力作用线的距离(常用l2表示).
3.画杠杆力臂的基本方法. (1)找出支点. (2)沿力的方向画出力的作用线(虚线). (3)从支点作力的作用线的垂线,支点到垂足的距离即为力臂.
注意事项: 1.动力和阻力是没有严格界限的,但不论是动力还是阻力,杠杆都是受力物体. 2.力臂是从支点到力的作用线的垂直距离,而不是支点到力的作用点的距离. 3.力臂有时恰在杠杆上,有时不在杠杆上. 如果力的作用线恰好通过支点,则力的力臂为零,若施加的力的力臂为零,则该力对杠杆没有转动效果.
杠杆处于静止状态或绕支点匀速转动都叫做杠杆平衡. 杠杆不论在什么位置静止,都可以称为平衡状态. 杠杆缓慢转动、将要转动,也属于杠杆平衡状态. 杠杆处于平衡状态时,有什么特点呢?
探究杠杆的平衡条件:设计与进行实验: 实验器材:杠杆、铁架台、钩码等. 实验步骤: (1)调节杠杆两端的平衡螺母,使杠杆在水平位置平衡.
(2)在杠杆的两边分别挂上数目不等的两串钩码,通过移动钩码悬挂的位置,使杠杆在水平位置重新平衡.
(3)测量并记录此时杠杆的动力(F1)、动力臂(l1)、阻力(F2)、阻力臂(l2). (4)改变动力和阻力的大小,重复上述步骤,将实验数据记录在表格中.
分析表格中的数据,比较F1×l1与F2×l2的大小,得出结论. 杠杆的平衡条件是: 动力×动力臂=阻力×阻力臂(或写作F1l1=F2l2) 对于不能确定究竟哪个是动力、哪个是阻力的情况,我们可以根据需要假定,但力与力臂必须对应,不可混淆.
思考讨论: 步骤1中为什么调节杠杆两端的螺母,使杠杆在水平位置平衡? 杠杆的平衡是指杠杆静止不转动或杠杆匀速转动.杠杆只有在水平位置平衡,从支点到动(阻)力作用线的距离,即力臂的长度,才可从杠杆上的刻度值直接读出.
步骤2中为什么在杠杆两边挂上不同数量的钩码,调节钩码位置,使杠杆在水平位置重新平衡? 在杠杆两边挂上不同数量的钩码,则杠杆在水平位置重新平衡时可使支点到动(阻)力作用线的距离不同(钩码位置),便于实验研究.
注意事项: 判断杠杆是否平衡不能只比较F1 和F2的大小,也不能只比较l1和 l2的大小,必须比较F1·l1与F2·l2的大小,若它们乘积相等,则杠杆平衡;哪一边的乘积大,杠杆就向那一边倾斜.
根据杠杆平衡条件F1l1=F2l2,将公式做简单的分析,可以得到三种类型的杠杆. (1)省力杠杆:当l1>l2时,F1<F2,即动力臂大于阻力臂时,动力小于阻力,这种杠杆叫省力杠杆. 例如,铡刀、起子、指甲刀等,它们虽然省力,但是费距离.
(2)费力杠杆:当l1<l2时,F1>F2,即动力臂小于阻力臂时,动力大于阻力,这种杠杆叫费力杠杆. 例如,筷子、镊子、钓鱼竿等,它们虽然费力,但是省距离. (3)等臂杠杆:当l1=l2时,F1=F2,即动力臂等于阻力臂时,动力等于阻力,这种杠杆叫等臂杠杆. 例如,天平、定滑轮等,它们既不省力,也不省距离.
1.杠杆:在力的作用下能绕着固定点转动的一根硬棒. 2.杠杆的五要素:支点、动力、动力臂、阻力、阻力臂. 3.杠杆力臂的画法:过支点作力的作用线的垂线,垂线段的长度就是力臂.
1.如图所示,各式各样的剪刀都是一对对 杠杆,要剪开较硬的物体,使用哪种剪 刀最合适 ( )
2.如图所示,轻质杠杆OA可绕O点转动;OA=0.3 m,OB=0.2 m,A点处挂一个质量为2 kg的物体G,B点处加一个竖直向上的力F,杠杆在水平位置平衡,则物体G的重力大小为______N,力F的大小为_____N.(取g=10 N/kg)
3.请在图甲中画出作用在“开瓶起子”上的动力F1的力臂和阻力F2的示意图.
相关课件
物理八年级全册第五节 机械效率课文课件ppt: 这是一份物理八年级全册第五节 机械效率课文课件ppt,共24页。PPT课件主要包含了什么是效率,85%,拉力的功率,动滑轮的机械效率等内容,欢迎下载使用。
沪科版八年级全册第四节 做功的快慢评课ppt课件: 这是一份沪科版八年级全册第四节 做功的快慢评课ppt课件,共21页。PPT课件主要包含了一些常见物体的功率等内容,欢迎下载使用。
沪科版八年级全册第三节 做功了吗课堂教学ppt课件: 这是一份沪科版八年级全册第三节 做功了吗课堂教学ppt课件,共25页。PPT课件主要包含了课堂小结等内容,欢迎下载使用。