




所属成套资源:川教版信息技术六年级下册课件+教案
信息技术川教版(2019)第二单元 我是机器人工程师第3节 垃圾的运输精品课件ppt
展开
这是一份信息技术川教版(2019)第二单元 我是机器人工程师第3节 垃圾的运输精品课件ppt,文件包含六年级下册信息技术23《垃圾的运输》第3课时川教版pptx、新课标六年级下册信息技术23《垃圾的运输》第3课时川教版doc等2份课件配套教学资源,其中PPT共25页, 欢迎下载使用。
夏日小清新商务通用PPT模板
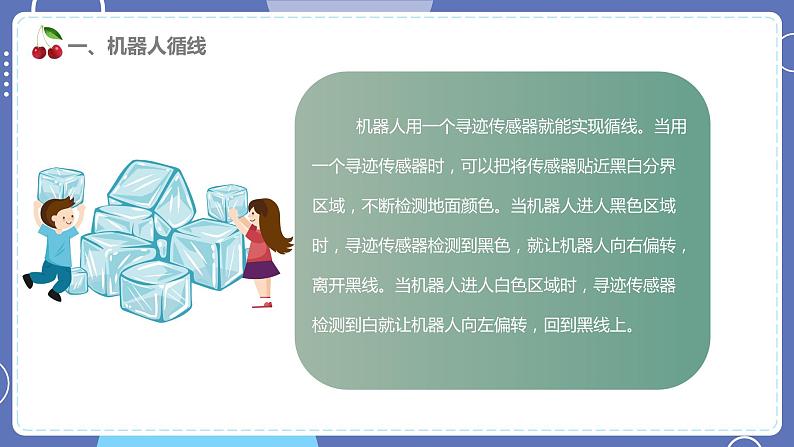
机器人循线
让机器人能沿黑线走需要使用多少个寻迹传感器呢?
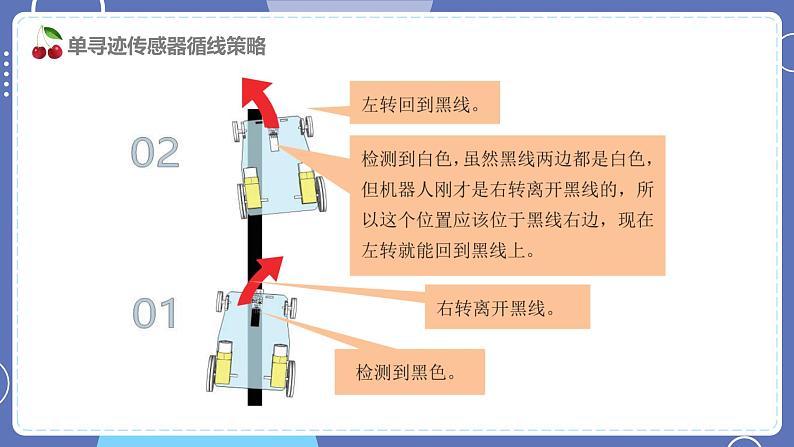
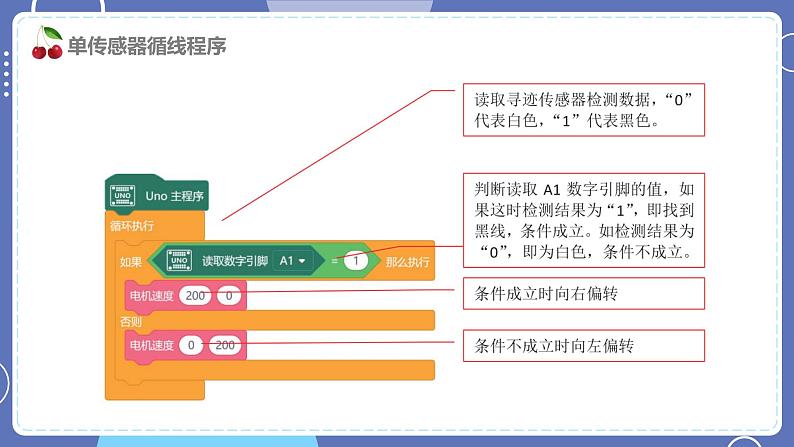
机器人用一个寻迹传感器就能实现循线。当用一个寻迹传感器时,可以把将传感器贴近黑白分界区域,不断检测地面颜色。当机器人进人黑色区域时,寻迹传感器检测到黑色,就让机器人向右偏转,离开黑线。当机器人进人白色区域时,寻迹传感器检测到白就让机器人向左偏转,回到黑线上。
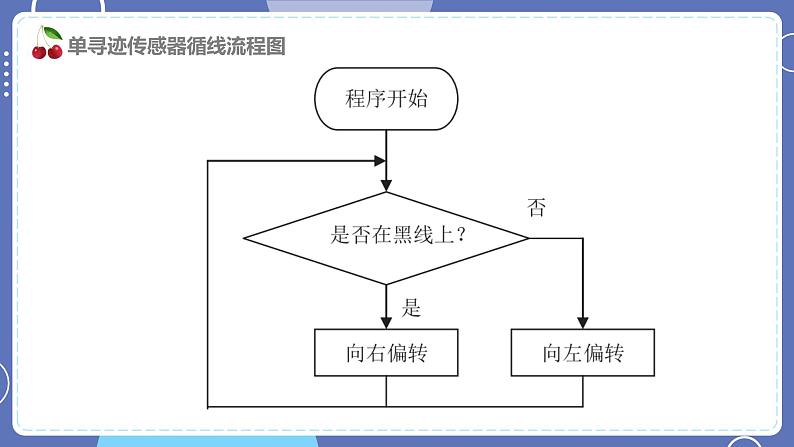
单寻迹传感器循线流程图
机器人走得左摇右摆,不太直,怎么办?
单寻迹传感器循线的优点是使用的传感器数量最少,但也存在不少的缺点。在调试时会发现,用上面的策略进行单寻迹传感器循线,机器人只有“左偏转”和“右偏转” 两个动作,会左摇右撰地沿黑线前进。
如果速度太快或者遇到弯度较大的黑线,还有可能循线失败。这是由于传感器数量少,机器人能从外界获得的信息有限,循线策略简单,使机器人无法准确沿线运动,更无法判断复杂路口。所以,要让机器人更好地循线,需要安装更多的传感器。
下图中机器人并排安装了三路寻迹传感器,这样机器人检测视野更宽,能更好地探测地面状况,同时循线策略也可以做到更加精准。
用三路寻迹传感器循线时增加了一种 “直行”状态,这样机器人循线动作就更加平滑、流畅。
从流程图上看出,循线时机器人会根据黑线位置不同,转向三条不同的分支,执行三种不同动作。对这种多分支结构,“多分支条件判断”模块可以方便地完成任务。
三路寻迹传感器循线程序
机器人在直线上走得快多了,即使走偏也能自己修正回来。但遇到比较大的弯道时,容易脱线。
但这时了个寻迹传感器都已经脱离了黑线,机器人怎么才知道应该往哪个方向转动呢?
在遇到急弯时,需要左右电机速度差才能更顺利修正方向。
可以新建一个变量来记住最后检测到黑线的是哪个传感器,就可以判断出机器人是从哪个方向脱线的啦。 比如可以约定好,左边寻迹传感“1”,右边传感器记“2”。
黑线在机器人在不同位置时,会执行不同的修正策略,尽量让黑线处于机器人正中位置,我们常把这些策略叫做 “算法”。
机器人循线时,安装的寻迹传感器越多,获取的信息就越多,机器人可以执行更多的循线策略,走线更精淮。人们也开发出集成多个传感器的寻迹模块,让机器人走线更流畅、精确。
黑线在不同位置时,小车的执行策略有何不同?
机器人循线任务里蕴含了很多科学原理,与人工智能无人驾驶有紧密联系,上网找一找其他循线方案,和同学们一起交流分享。
今天你有哪些收获?遇到了哪些困难?是怎么解决的?还有哪些困惑?谈谈本节课的收获。
相关课件
这是一份小学信息技术川教版(2019)五年级下册第二单元 人工智能初步体验第3节 智能生活获奖课件ppt,文件包含五年级下册信息技术23《智能生活》川教版pptx、五年级下册信息技术23《智能生活》川教版doc等2份课件配套教学资源,其中PPT共17页, 欢迎下载使用。
这是一份小学信息技术川教版(2019)六年级下册第3节 垃圾的运输精品ppt课件,文件包含六年级下册信息技术23《垃圾的运输》第2课时川教版pptx、新课标六年级下册信息技术23《垃圾的运输》第2课时川教版doc等2份课件配套教学资源,其中PPT共24页, 欢迎下载使用。
这是一份小学川教版(2019)第3节 垃圾的运输精品ppt课件,文件包含六年级下册信息技术23《垃圾的运输》第1课时川教版pptx、新课标六年级下册信息技术23《垃圾的运输》第1课时川教版doc等2份课件配套教学资源,其中PPT共24页, 欢迎下载使用。








