





所属成套资源:浙教版信息技术九年级PPT课件+教案全册
浙教版 (2020)九年级全册第14课 机器人探险优质课课件ppt
展开
这是一份浙教版 (2020)九年级全册第14课 机器人探险优质课课件ppt,文件包含第14课机器人探险pptx、第14课机器人探险doc、避障机器人avi等3份课件配套教学资源,其中PPT共24页, 欢迎下载使用。
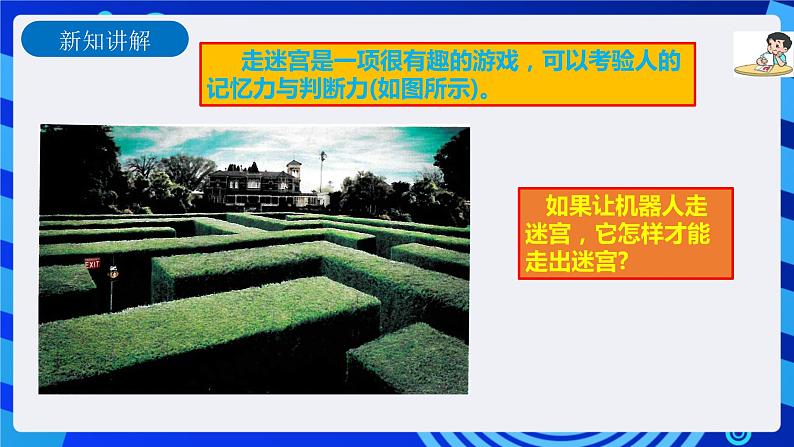
走迷宫是一项很有趣的游戏,可以考验人的记忆力与判断力(如图所示)。
如果让机器人走迷宫,它怎样才能走出迷宫?
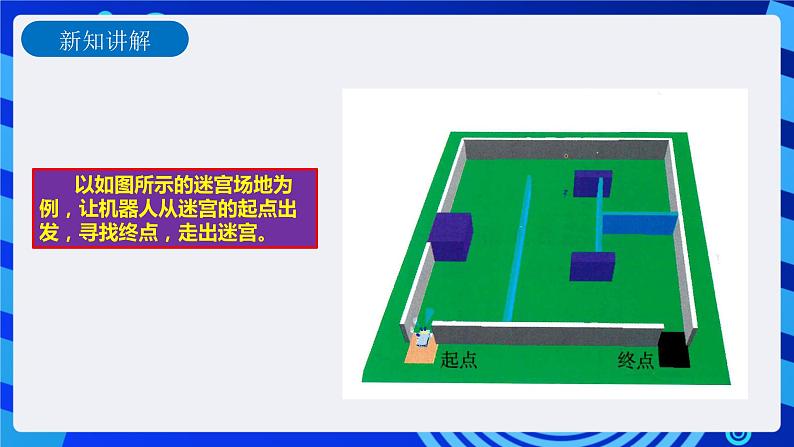
以如图所示的迷宫场地为例,让机器人从迷宫的起点出发,寻找终点,走出迷宫。
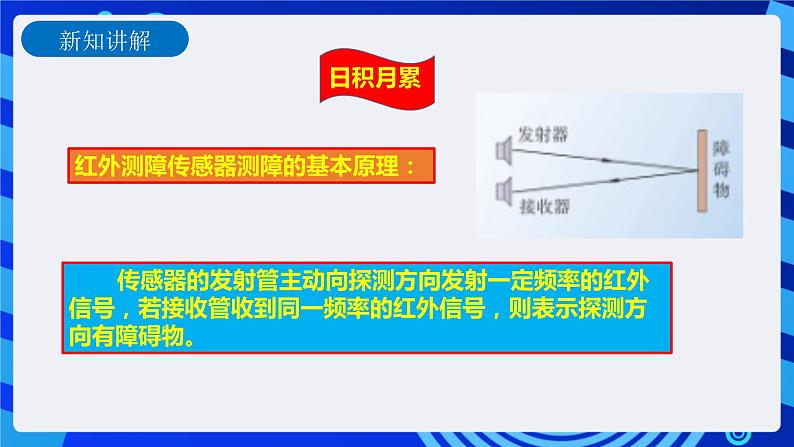
红外测障传感器测障的基本原理:
传感器的发射管主动向探测方向发射一定频率的红外信号,若接收管收到同一频率的红外信号,则表示探测方向有障碍物。
红外避障传感器的优点:
(1)环境适应性好,在夜间和恶劣气象条件下的工作能力优于可见光;
(2)被动式工作,隐蔽性好,不易被干扰;
(3)红外系统的体积小、质量轻、功耗低;
(4)不受电磁波的干扰、非噪声源、可实现非接触性测量。
如果按左手法则行走,那么根据前方和左侧墙面的情况确定运动状态:
(1)当前方有墙面时,向右转。
(2)当前方没有墙面时,判断左侧是否有墙面。
如果左侧有墙面,且距离适当,前进。如果靠左侧墙面太近,机器人容易与墙面摩擦,影响速度,此时转向右前方。
当离左侧墙面太远时,转向左前方,接近墙面(如图所示)。
利用左手法则,按照如图所示传感器安装的位置
设计流程图如图所示。
配件:主机1个,马达2个,随动轮1个,红外传感器3个(A,B,C),1个灰度传感器。
A传感器所接的端口号:( )B传感器所接的端口号:( )C传感器所接的端口号:( )灰度传感器所接的端口号:( )
在出口放置一个表示终点的色带。
传感器检测到障碍时的值是( )检测不到障碍时的值是( )
1.调试机器人能否避开前方障碍。
采取关键点逐项调试法,提高调试效率:
2.调试机器人沿着墙壁能否不碰墙前进。
3.调试机器人能否转过墙壁的转角。
一、问题分析二、设计流程图三、项目实施
1.设计一个能遇到障碍物改变方向行走的机器人
相关课件
这是一份浙教版 (2020)九年级全册第15课 机器人灭火优秀课件ppt,文件包含九年级全册信息技术浙教版第三单元第15课机器人灭火课件pptx、九年级全册信息技术浙教版第三单元第15课机器人灭火教案doc等2份课件配套教学资源,其中PPT共23页, 欢迎下载使用。
这是一份初中信息技术浙教版 (2020)九年级全册第三单元 智能机器人第13课 机器人认路一等奖课件ppt,文件包含九年级全册信息技术浙教版第三单元第13课机器人认路课件pptx、九年级全册信息技术浙教版第三单元第13课机器人认路教案doc等2份课件配套教学资源,其中PPT共26页, 欢迎下载使用。
这是一份浙教版 (2020)九年级全册第三单元 智能机器人第12课 机器人巡逻优秀ppt课件,文件包含九年级全册信息技术浙教版第三单元第12课机器人巡逻课件pptx、九年级全册信息技术浙教版第三单元第12课机器人巡逻教案doc等2份课件配套教学资源,其中PPT共22页, 欢迎下载使用。








