浙江省四校2023-2024学年高二下学期3月月考技术-高中通用技术试卷(Word版附解析)
展开一、选择题(本大题共12小题,每小题2分,共24分。每小题列出的四个备选项中只有一个是符合题目要求的,不选、多选、错选均不得分)
1. 如图所示是一款自动药品售卖机,从技术的性质、技术的价值角度分析,下列对该款售卖机的描述中不正确的是( )
A. 能自动提供24小时买药服务,体现了技术具有解放人的作用
B. 开发了新一代微电脑实现智能操控,体现了技术的创新性
C. 售卖机传动技术的内容和体系复杂,体现了技术的复杂性
D. 能实现药品选择、数字支付、药品传输等功能,体现了技术的实用性
【答案】D
【解析】
2. 如图所示是一款电动角磨机,下列分析中恰当的是( )
A. 具有打磨、切割等多种功能,体现技术的综合性
B. 机身适合使用者握持,体现了人机关系的舒适目标
C. 内置电机采用高品质铜线,符合设计的技术规范原则
D. 开机运行时声音较大,设计时考虑了人机关系的信息交互
【答案】B
【解析】
3. 以下榫卯结构的连接方案中,最合理的是( )
A. B. C. D.
【答案】C
【解析】
4. 如图所示的家用折叠小推车,下列分析与评价中不正确的是( )
A. 快速收纳,实现了人机关系的高效目标
B. 扶手高度最高可调至980mm,主要考虑了人的动态尺寸
C. 扶手采用加厚的铝合金材料,主要提高了结构的强度
D. 可伸缩结构的设计实现推车底面550-660mm的调节,说明功能的实现需要相应结构来保证
【答案】B
【解析】
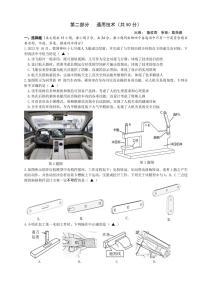
5. 如图所示的图样中存在的错误共有( )
A. 1处B. 2处C. 3处D. 4处
【答案】B
【解析】
6. 小明在木工实验室加工图a所示的木质燕尾榫结构,其中构件1的榫头部分如图b所示。下列关于构件2的设计方案中正确的是( )
A. B. C. D.
【答案】A
【解析】
7. 小明在木工实验室加工图a所示的木质燕尾榫结构,其中构件1的榫头部分如图b所示。在加工该榫卯结构的实践操作中,下列描述不合理的是( )
A. 制作榫头时,宜采用钢丝锯进行锯割
B. 制作榫眼时,可以根据榫头的实际尺寸用木工铅笔画线
C. 为了提高连接的可靠性,可以在榫头和榫眼处涂抹木工胶
D. 加工榫头时,初学者可以采用双刃刀锯进行锯割,锯割时要留出加工余量
【答案】A
【解析】
8. 下列是通用技实践课上同学们进行的加工操作,其中符合操作要领的是( )
A. 锯割B. 锉削C. 钻孔D. 冲眼
【答案】B
【解析】
9. 如图所示某物料翻转系统,液压杆作为翻转动力。物料翻转后,下列对各个构件主要受力形式分析不正确的是( )
A. 连杆2受弯曲B. 连杆1受扭转
C. 各连接点均采用动连接D. 液压杆受压,L型翻转台受弯曲
【答案】B
【解析】
10. 如图所示是焊接元器件的各个环节,下列说法中正确的是( )
A. 焊接时应将元器件的引脚剪断后再焊接
B. 省去环节②和环节④,可以提高流程的效率
C. 合理的焊接流程是:④③①②⑥⑦⑧⑤
D. 元器件体积有大有小,有高有低,焊接时应遵循先高后低,先大后小的原则
【答案】C
【解析】
11. 如图所示是擦洗窗户的机器人,包含夹持手、驱动器、传动系统以及位置传感器等,通过精密的算法计算和程序控制驱动关节处的步进电机运转,达到擦洗窗户的功能。当机器人的夹持手擦洗窗户时,夹持手应当在垂直于窗户平面的方向施加一个恒定的力F,同时在平行于窗户平面的方向走出一条运动轨迹,为了使操作臂以恒力在一个表面上滑动,必须应用力-位置混合控制系统,关节处装有位置传感器,用来测量相邻杆件的相对位置,为了平稳控制操作臂从一点运动到另外一点,通常的方法是使每个关节按照指定的时间连续函数来运动。一般情况下,操作臂各关节同时开始或同时停止运动,这样操作臂的运动才显得协调,轨迹生成需要准确计算出相关运动函数。机器人手臂的关节越多,机器人就越灵巧,能力越强。从系统的角度分析,下列说法中不恰当的是( )
A. 该系统可分为恒力控制子系统和位置控制子系统
B. 设计位置控制系统时需要计算时间连续函数
C. 设计该系统时,要从局部出发,以系统局部功能的最优为目的
D. 各子系统单独工作,都不能实现擦洗窗户的功能,体现了系统的整体性
【答案】C
【解析】
12. 如图所示是擦洗窗户的机器人,包含夹持手、驱动器、传动系统以及位置传感器等,通过精密的算法计算和程序控制驱动关节处的步进电机运转,达到擦洗窗户的功能。当机器人的夹持手擦洗窗户时,夹持手应当在垂直于窗户平面的方向施加一个恒定的力F,同时在平行于窗户平面的方向走出一条运动轨迹,为了使操作臂以恒力在一个表面上滑动,必须应用力位置混合控制系统,关节处装有位置传感器,用来测量相邻杆件的相对位置,为了平稳控制操作臂从一点运动到另外一点,通常的方法是使每个关节按照指定的时间连续函数来运动。一般情况下,操作臂各关节同时开始或同时停止运动,这样操作臂的运动才显得协调,轨迹生成需要准确计算出相关运动函数。机器人手臂的关节越多,机器人就越灵巧,能力越强。下列关于机器人控制系统的分析中不正确的是( )
A. 夹持手是被控对象
B. 驱动器是控制器
C. 通过机械、电子相结合的控制手段达到整体功能的实现
D. 算法和程序的优化会影响擦洗的效果,是该控制系统的影响因素
【答案】B
【解析】
二、非选择题(本大题共3小题,第13题6分,第14题10分,第15题10分,共26分。)
13. 小明出门需要乘坐电梯,但他发现电梯时常因故障而停用。他想学习电梯的运作原理分析故障原因,于是在网上查找了如图所示的电梯系统架构图,请完成以下任务:
(1)小明发现问题的方法是_____;
A.观察日常生活 B.收集和分析信息 C.技术研究与技术试验
(2)小明根据收集到的信息进行分析:
A.电梯轿厢内设计美观的图案,让人心情愉悦;
B.在无人乘坐时,轿厢系统中的电灯、风扇等装置都会休眠;
C.电气控制系统采用新型元器件,具有低延时、高稳定的优点;
D.电梯必须安装安全保护系统,防止危及人身安全事故发生;
其中主要符合美观原则是_____,主要符合可持续发展原则的是_____;
(3)小明对轿厢系统进行了分析:
A.主要保证轿厢的运行效率即可,无需考虑乘坐舒适性;
B.结合人体平均身高数据,将按钮设计在1.2m—1.3m;
C.设计时既要满足轿厢内的美观,又要保证紧急按钮等标识明显;
D.必须要优先考虑电梯系统的整体架构,再进一步考虑轿厢系统;
E.可以凭借经验设计轿厢内的空间大小;
其中遵循了系统分析主要原则的有_____;
【答案】 ①. A ②. A ③. B ④. BCD
【解析】
14. 小明带领的学习小组在通用技术实践课上提出了一个关于探月机器人设计与制作的创意项目,主要目标是完成月球资源勘探的任务。他们采用电机和机械传动结构分别设计了两款机械臂结构实现水平夹持的功能,如图a和图b所示。在模拟勘探月球资源的过程中发现机械臂还需要将月球矿物从低处往高处搬运进行存储,现需要重新设计一个具有升降和夹持功能的机械臂结构。
图a 图b
设计要求如下:
A.能夹持住100mm*100mm*100mm的模拟矿物;
B.能将模拟矿物从低处往高处搬运,运动平稳可靠;
C.结构具有一定的强度和稳定性;
D.采用电机驱动,其余材料自选。
(1)在头脑中构思符合设计要求的多个方案,画出其中最优方案的设计草图(电机可用方框表示),简要说明方案的工作过程_____;
(2)草图上标注主要尺寸_____;
(3)小明完成机械臂的制作后进行了测试,以下有关该机械结构的设计与测试方式中不合理的是_____。
A.设计时需要考虑电机轴的形状和大小;
B.用适当的力按压机械装置,观察蜗轮蜗杆是否明显变形;
C.当夹持臂夹紧时,观察能否将模拟矿物平稳地上下搬运;
D.设计分析时机械臂水平打开尺寸能夹持住100*100*100mm的模拟矿物考虑的是环境。
【答案】 ①. ②. ③. B
【解析】
15. 如图所示是小明家阳台的木制高脚花盆,寒假和父母外出旅游,回来发现种的植物因缺水出现枯萎的现象,于是设计了一款如图a所示的定时浇水控制系统,设定的时间根据植物的生长特性确定,当达到设定的时间时,控制器控制水泵,以实现定时浇水的功能。
图a定时浇水控制系统
(1)该定时浇水控制系统的控制方式属于_____(A.开环控制;B.闭环控制);
在使用的过程中,由于天气变化会出现浇水过多或浇水过少的情况,于是想改进该系统,设计了一个土壤湿度控制系统,如图b所示,湿度传感器实时检测土壤的湿度与设定的湿度值作比较,当实际湿度比设定的湿度低时,控制器控制电磁阀打开,给植物浇水,当实际湿度达到设定土壤湿度时,控制器发出信号关闭电磁阀,停止浇水。
图b
(2)小明在该系统改进中拟解决的问题是_____;
A.设计定时浇水控制系统 B.设计土壤湿度控制系统 C.设计集水箱自动加水控制系统
(3)根据题图及其描述填写土壤湿度控制系统方框图_____、_____、_____、_____。
(4)小明测试制作的模型后,接下来需要做的是_____;
A.收集信息 B.方案构思 C.方案筛选 D.方案评价
(5)如图所示是加入湿度控制后的花盆架坐标评价图,下列有关说法正确的是_____;
A.该花架的的评价依据仅有设计的一般原则;
B.下方中间的支撑脚主要是为了提高结构的强度;
C.该花架的控制系统已经非常完美,没有优化的空间了;
D.该花架的稳固性较差,增加支撑脚的长度可以提高结构的稳定性。
【答案】 ①. A ②. B ③. 电磁阀 ④. 土壤 ⑤. 土壤的湿度(实际的湿度) ⑥. 湿度传感器 ⑦. D ⑧. B
【解析】
浙江省绍兴市第一中学2023-2024学年高二下学期期中考试(学考)通用技术试卷(Word版附解析): 这是一份浙江省绍兴市第一中学2023-2024学年高二下学期期中考试(学考)通用技术试卷(Word版附解析),文件包含浙江省绍兴市第一中学2023-2024学年高二下学期期中考试技术学考试卷-高中通用技术Word版含解析docx、浙江省绍兴市第一中学2023-2024学年高二下学期期中考试技术学考试卷-高中通用技术Word版无答案docx等2份试卷配套教学资源,其中试卷共11页, 欢迎下载使用。
浙江省衢温51联盟2023-2024学年高二下学期4月期中联考通用技术试卷(Word版附解析): 这是一份浙江省衢温51联盟2023-2024学年高二下学期4月期中联考通用技术试卷(Word版附解析),文件包含浙江省衢温5+1联盟2023-2024学年高二下学期4月期中联考技术试题-高中通用技术Word版含解析docx、浙江省衢温5+1联盟2023-2024学年高二下学期4月期中联考技术试题-高中通用技术Word版无答案docx等2份试卷配套教学资源,其中试卷共15页, 欢迎下载使用。
浙江省杭州市桐浦富兴联谊学校2023-2024学年高二下学期5月月考通用技术试题(Word版附解析): 这是一份浙江省杭州市桐浦富兴联谊学校2023-2024学年高二下学期5月月考通用技术试题(Word版附解析),文件包含浙江省杭州市桐浦富兴联谊学校2023-2024学年高二下学期5月月考技术试题-高中通用技术Word版含解析docx、浙江省杭州市桐浦富兴联谊学校2023-2024学年高二下学期5月月考技术试题-高中通用技术Word版无答案docx等2份试卷配套教学资源,其中试卷共18页, 欢迎下载使用。